

智能起重机在现代物流园中的应用
1 库区概况
厂房共设5个区,其中2个为线材库,3个为棒材库。库容设计为1.5×105t,年吞吐量为2.0×106t,每个库内设置2台起重机。物料运输采用汽车运输的方式,当汽车载货到库区装卸工位后,起重机将汽车上的货物逐次吊运下来,并摆放到指定垛位。当需要将库区内的货物运输出去时,空车停到库区装卸工位,起重机将库区内货物吊运到汽车上,再由汽车运输出去。库区基本规划如图1所示。
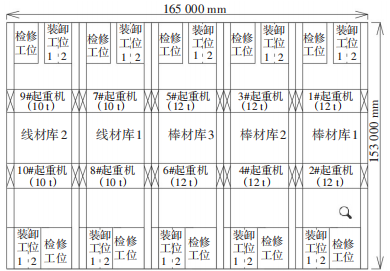

图1 库区基本规划
2 智能化应用
目前,虽然国内的系统集成商和设备制造商落地的智能化产品逐步增多,可应用于各种特殊场景,但对智能化系统在钢铁冶炼领域的应用还处在研究探索阶段,尤其是几大核心系统的突破。在现有的自动化基础上,智能起重机最核心的系统主要包括机器视觉识别系统、三维空间定位系统、防摇摆系统、状态监控系统以及无线通信系统等。精确识别、准确定位、高效防摇、稳定网络以及安全监控保护,每一项内容都是智能起重机的基本要求。在现有技术的基础上,智能起重机借助智能控制技术、自动化技术、信息化技术以及互联网技术等,形成了一套完整的起重机智能化管控平台。
(1)机器视觉识别系统
在智能化应用场景中,各种货物信息的识别、检验以及反馈是实现起重机自动吊装的关键。准确识别车辆、物料、垛位等,不仅决定着起重机工作的可靠性,而且为起重机的控制系统提供了有效的运动目标和目的地等重要的空间坐标参数。本项目的机器视觉识别系统采用当前相对成熟的3D扫描仪系统构建。利用成熟的激光飞行原理和多重回波技术实现非接触检测,能够准确检测到物体边沿几何尺寸和空间距离。在库区顶部和起重机横梁上安装3D扫描仪,分别对库区垛位、装卸工位、车辆意见货品的几何尺寸和位置坐标进行分析定位,可为起重机控制系统提供基础数据。起重机系统根据扫描仪反馈的空间参数,并结合接收到的目标指令进行货品的抓取等作业。3D扫描抗干扰能力强(通过内部滤波和多重回波),测量距离远(约60 m),能够根据实际情况设置扫描区域等。车辆及货品扫描图像如图2所示。

(a) 车辆扫描图像
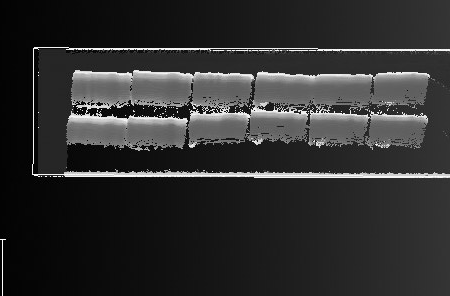
(b) 货物扫描图像
图2 车辆及货品扫描图像
(2)三维空间定位系统
起重机三维定位系统的精确度不仅影响起重机工作的安全性,也影响防摇摆系统的准确性。本项目采用编码尺和编码器相结合的方式对起重机的大车(X 方向)、小车(Y 方向)以及升降(Z 方向)进行测距和定位。其中,大小车采用编码尺方式,升降采用多圈绝对值编码器方式。编码尺选用不锈钢材质,沿着大车和小车的运行轨道铺设,与轨道保持相同的水平度和高低差。起升高度定位采用绝对值编码器,其安装在卷筒尾部,通过编码器记录旋转圈数,进而换算为起升高度,数值准确可靠。为减少钢丝绳拉长和减速机啮合带来的误差,每次起升到位后使用接近开关重新标定编码器零点,确保误差始终处于可控范围内。定位系统设备与可编程逻辑控制器(Programmable Logic Controller,PLC)之间采用ProfiNet总线通信,数据传输准确可靠。三维定位示意图如图 3所示。
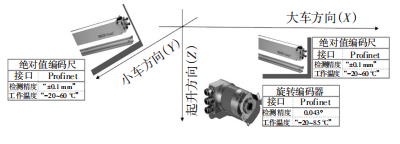
图3 三维定位示意图
(3)防摇摆系统
吊物通过钢丝绳与起重机连接,其运动总是落后于起重机,导致起重机与吊物之间总是存在一个夹角。在起重机加减速的过程中,吊物在重力作用下会出现来回摇摆的现象,难以快速稳定就位。所以,防摇摆技术一直是智能起重机系统中的关键技术,对起重机的平稳、高效运行起着关键作用。随着技术的研发和升级,电气防摇摆系统成为当前使用频率最高、防摇摆效率最好且对起重机本身机械结构冲击最小的系统。本次项目采用的电气防摇摆系统,其大小车和起升机构本身附带专业防摇卡的变频器控制,然后结合PLC组成防摇摆系统的核心系统。
本次项目采用当前最常用、最经济高效的开环控制防摇摆系统,无须角度测量反馈装置,直接通过控制算法实现防摇效果。起重机大车、小车的走行驱动系统均采用变频器驱动,并在大车机构、小车机构以及起升装置上安装旋转编码器来分别测量大车速度、小车速度以及起升装置的实时高度。根据起重机的作业指令、实际运行速度以及摆绳长度等数据计算角度变化,再通过钟摆模型计算当前所需要的大小车速度值。PLC将处理后的给定值发送给传动机构,实时调整给定的加速值或减速值来抵消和限制摆动角度,在起重机到达目标位置时停止调整并实现平稳静止。防摇摆系统结构如图4所示。

图4 防摇摆系统结构图
防摇摆系统调试完成后,起重机整体运行噪声降低,减少摆动幅度约94%,生产效率提高约34%,且在短时间内实现了精确定位,实现了起重机的安全平稳运行。
(4)状态监控系统
状态监控是起重机无人化系统中必不可少的环节,对起重机进行工况监测和视频监控,有助于实时掌握起重机的运行状态和操作情况。相关数据通过网络传输到地面服务器,从而实现行车与地面的信息同步。工况监测主要是保证起重机的安全稳定运行,并对运行数据进行采集和监控。通过搭建无线网络传输系统,将起重机的大车、小车以及起升装置的空间位置、质量、限位、制动器状态、相邻起重机的安全距离、联锁保护装置状态以及故障报警等信息传输到地面的中控室电脑端,并生成记录曲线,以便主控人员和运维人员评估起重机的工作状态。当起重机运行发生故障时,监测系统一方面要第一时间通过报警铃声和画面警示的方式提醒中控人员,另一方面要快速生成应对方案供维检人员参考,以快速解决问题。起重机工况监测画面如图5所示。

图5 起重机工况监测画面
视频监控是为了实时查看起重机的工作情况。在起重机端梁两侧的小车等位置安装多个具有400万像素的高清摄像机,对起重机大车运行的两侧,小车运行的轨道、吊具、司机室,起重机走道以及电气室内部等位置进行视频监控,方便主控人员随时掌握起重机周边、本体、电气室、吊具、吊物以及地面的实时情况,避免无关人员误入库区、轨道或通廊。摄像机将视频信号采集到起重机的硬盘录像机,同时将实时信号传输回地面的视频服务器进行存储和监视。
(5)无线通信系统
为了确保起重机系统的稳定运行,无线传输系统采用专网专用的方式。每台起重机上均设有两套无线系统,一套用于起重机控制系统及工况监测数据传输,另一套用于视频系统信号传输。起重机本体控制系统与地面服务器以及上层仓库管理系统(Warehouse Management System,WMS)数据交换所需的数据发送、接收器件,采用西门子的漏波电缆传输方案。其不仅能够在覆盖范围内实现控制和设定,而且传输过程无接触,避免了磨损问题,还解决了传统拖缆和滑线通信数据有限、投资高、易损坏以及传统无线传输闪断、延迟、可靠性低等问题。漏波电缆传输设备由 SCALANCE W 无线接入点、RCoax漏波电缆、光电转换模块以及电源模块等组成,每根RCoax 漏波电缆长度不超过 200 m。无线接入点统一采用W788-2 M12双无线网卡的IWLAN接入点,带有6个N型接口,可自由选择 2.4 GHz/5 GHz 的工业无线局域网,传输速率最高可达到450 Mb/s。
在大车轨道一侧铺设漏波电缆,通过柔性馈线进入每段漏波电缆终端的控制信号接线箱,进而接入无线接入点。控制无线信号通过电/光转换模块输出光纤进入轨道一侧的控制集中接线箱,再利用光纤传输到地面中控系统。信号接进安装在厂房内的无线接入点,无线接入点经光纤同地面中控系统进行组网。起重机及中控室可通过无线装置进行交互,两者之间的通信连接满足安全、高效的设计需求,且带宽足够多台设备同时使用。它的漏波电缆传输方案如图 6 所示。
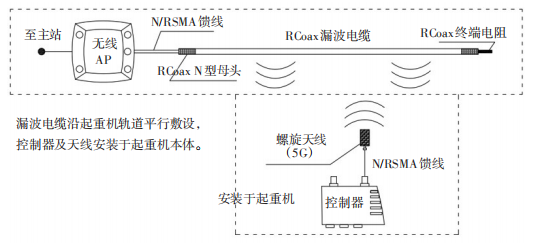
图6 漏波电缆传输方案
3. 结语
本次项目的探讨和研究具有重要的理论意义和实践意义,为现代化智能工厂的实现提供了一条有效的技术途径。库区无人化作业后,实现了安全生产和低碳高效运行。智能化行车虽然前期投资较大,但带来了可观的效益。第一,所有设备均实现自动控制,基本不存在机械冲击,能够有效延长机械设备的使用寿命。第二,完善的设备生命周期管理和监控系统能够有针对性地提高起重机的性能,并保证起重机的安全运行。第三,自动点检和润滑系统能够确保设备长期稳定运行,大幅降低运维费用。第四,采用自动化操作可避免人工操作失误情况的发生,降低设备故障率。第五,通过远程监测和大数据统计分析能够实现对设备的预防性维修,避免设备故障耽误工作进度而带来的经济损失。第六,对专业的起重机操作员需求减少,节约了人力成本。第七,设备平稳运行,减少了震动、抖动以及冲击现象的发生,进一步降低了车间噪声,创造了良好的工作环境。目前,该智能车处于调试试用阶段,后续将持续跟进和研究智能起重机在棒线材库区的使用情况。


{kind=link}