

智能控制桥臂的起重机防摇系统:提升起重作业效率与安全的创新方案
在当今全球化贸易蓬勃发展的时代,货物运输的效率与安全至关重要。起重机作为货物装卸的关键设备,广泛应用于机场、码头、工厂等大型运输场所。然而,由于钢丝绳柔性、操作熟练度、风力等因素影响,货物在吊运过程中极易产生摇摆,不仅降低装卸效率,还存在严重安全隐患。为解决这一难题,本文将详细介绍一种智能控制桥臂的起重机防摇系统的设计与实现。
一、起重机防摇系统设计背景
近年来,随着全球贸易往来日益频繁,货物运输需求不断增长,起重机在货物装箱、搬运环节的重要性愈发凸显。但在实际作业中,起重机位移装置与货物多通过钢丝绳连接,多种因素导致货物在运送过程中摇摆不定。虽然国内已采用电子防摇技术,但由于起重机系统数学模型具有非线性和不确定性,常规控制方法效果不佳,部分装备电子防摇系统的集装箱起重机甚至被拆除。因此,开发不依赖数学模型、适应不确定性的智能控制方法,对解决起重机防摇问题意义重大。一个高效的防摇装置,不仅能避免碰撞事故,还能显著提升起重机操作效率与安全性。
二、系统设计方案
1. 二维机械结构设计
该起重机防摇系统采用X、Y轴两个维度的线性滑杆龙门设计,这种设计是整个系统的基础架构。滑杆上的滑块可随滑台皮带传动在两个轴上灵活切换坐标位置,其下方的万向摆连接吸盘用于吸取重物。支架底部与四周使用铝型材和木棒固定,确保整体装置稳定。两个步进电机及驱动器安装在步进电机固定架上,负责驱动滑块移动。其中,滑块安装在X轴滑杆上,通过连接杆带动Y轴方向滑杆,实现滑块在Y轴方向的移动。控制电路板和气泵安装在滑块上方,电路板采用双层结构,上层布置主控芯片及显示屏,下层设置继电器模块、电源模块和蓝牙模块。姿态传感器安装在万向节杆上,用于检测各方向姿态角,并配备独立电池以便随时进行电脑上位机加计校准与Z轴归零。气泵与电磁阀安装在3D打印机内,一同固定在滑块上的防摇台上。此机械结构具备起重机平面移动、载重及卸货模拟的基本功能,与实际起重机结构相似,有助于提高数据算法的可靠性。
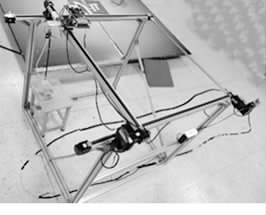

二维结构设计
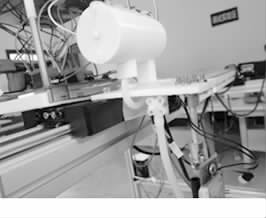
气泵与电路板结构侧视图

防摇台设计图
2. 硬件总体设计
主控模块:选用意法半导体公司的STM32F429IGT6作为主控芯片,相较于STM32F407,它降低了停止模式的电流消耗,可延长便携应用的电池寿命。同时,增加了TFT – LCD控制器、STChrom – ARTAccelerator和SDRAM存储器接口,有效提升图形处理性能。
电源模块:负责为系统各模块供电,采用7.4V2000mA锂离子电池、3.3V锂离子充电电池以及22.8VBT48电池。由于各模块工作电压不同,还设计了3.3V稳压电路,确保各模块稳定运行。
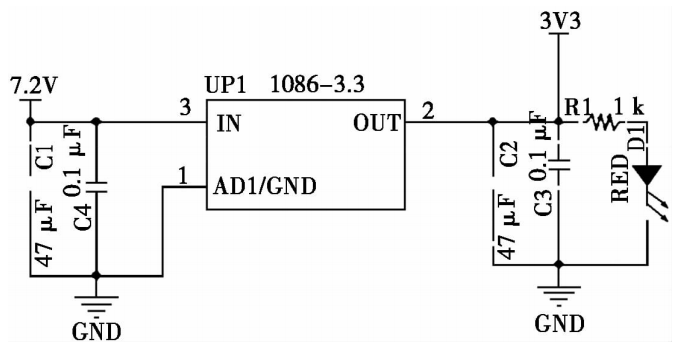
电源模块
蓝牙姿态传感器:采用维特智能的蓝牙姿态传感器BWT61P,该传感器支持三维加速度、三维陀螺仪和三维欧拉角检测,具有高精度、高性能、低成本的优势,能精准获取货箱姿态信息。
步进电机及驱动模块:经对比伺服电机、直流电机和步进电机的特性,最终选择步进电机。它具有最大转矩,精度在3% – 5%,位置精度和运动重复性好,启停和反转响应优秀,能满足系统对电机的要求。
蓝牙通信模块:采用增强版蓝牙HC – 05模块,实现手机APP与单片机之间快速、准确的命令传输,并将处理结果显示在OLED上,方便用户操作和查看。
其它辅助模块:还使用了OLED模块、3.3V稳压模块和继电器模块作为辅助模块,协同各主要模块工作,保障系统稳定运行。
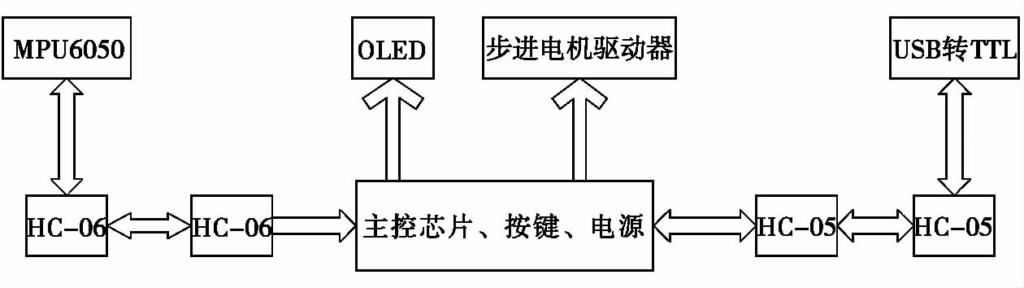
总体硬件框图
3. 软件总体设计
软件部分主要负责数据处理与系统控制,分为数据采集端、控制端和上位机端。数据采集端获取6轴加速度原始数据,经过硬件滤波、卡尔曼滤波和DMP库计算出姿态角,传输到控制端。控制端接收数据后,先进行校验,再解算摆角和摇摆速度,利用双闭环PID算法计算出步进电机的运作速度,并通过串口DMA发送给上位机端。上位机接收到数据后,同样先校验再分类,通过3D图片控件显示在主界面,同时在副界面显示货箱姿态数据。
PID控制器:货箱摆角调节与小车速度加速度密切相关。本系统以角度偏差为输入,经PID运算后输出值作为步进电机的输入脉冲频率,控制小车速度。考虑到系统需求,选择位置式PD控制,只调节货箱竖直状态,不考虑调节后小车位置。由于数据采集周期约10ms,每帧数据处理完成后进行PID运算,实时调整步进电机速度和转向。此外,为满足起重机工作要求,采用双闭环串级PID控制,加入速度环控制小车调整过程中的移动范围。
串口DMA数据传输:在数据采集和控制过程中,USART2用于数据采集,波特率为115200,对主控芯片负担较大。若USART1发送数据过于频繁,会影响通讯质量。因此,采用DMA数据传输方式,减轻主控芯片负担,确保通讯稳定。

软件设计总体流程图
三、系统功能与优势
该起重机防摇系统具备多项实用功能和显著优势。首先,能有效实现静态防摇效果,大幅提升起重机操作效率和安全性,减少货物吊运过程中的摇摆,降低事故风险。其次,系统设计便于技术人员进行二次开发与维护,为后续功能拓展和优化提供便利。再者,系统集成蓝牙和触摸屏功能,用户既可以通过蓝牙连接手机APP进行远程操作,也能通过触摸屏进行近距离操作,操作方式灵活多样。此外,还具备定位搬货功能,可通过手机APP或触摸屏发送命令,指定在某个位置卸货或装货,完成任务后自动返回原点,进一步提高装卸作业的智能化和自动化水平。
经调试,该起重机防摇系统成功实现桥臂的智能控制,为解决起重机吊具摇摆问题提供了可靠的技术方案。在未来,随着技术的不断进步,此类智能防摇系统有望在更多起重设备中得到应用,推动整个起重行业向更高效、更安全的方向发展。


{kind=link}