

起重机主梁智能化激光测量系统设计
起重机形式多样且应用广泛,其主梁是主要承载结构,工作一定时间后,由于主梁长期受载荷作用,不可避免会产生一定程度的材料损伤,体现为载重后主梁的下挠值增大,达到一定程度后就容易断裂,造成安全事故。起重机主梁额定载重时的下挠值可以表征其垂直刚度,是衡量其性能,评估其承载能力和剩余寿命的重要参数指标。根据国标相关要求,手动小车(或手动葫芦)位于桥架主梁跨中位置时,由额定起升载荷及手动小车(或手动葫芦)自重载荷在该处产生的垂直静挠度f与起重机跨度S的关系,推荐为f <1/400 S;自行式小车(或电动葫芦)位于桥架主梁跨中位置时,由额定起升载荷及自行式小车(或电动葫芦)自重载荷在该处产生的垂直静挠度f与起重机跨度S的关系,推荐为低定位精度要求的起重机:f<1/500 S;中等定位精度特性的起重机f<1/750 S;高定位精度特性的起重机:当铸f <1/1000 S;造起重机小车起吊额定载荷位于跨中,与载荷试验时的原始下挠值(或设计计算下挠值)相比,主梁下挠值增加量达到或超过跨度的0.15/1000时,应报废。
测量起重机主梁的下挠值是对其进行安全性检测的最直接有效的方法。目前行业内常用的起重机主梁的下挠值测量方法主要有全站仪法和经纬仪法,其本质上都是转换为为直接测量其空载和额定载重时的拱度值,再通过计算差值间接测量下挠值。这两种测量方法,经纬仪法需要两人配合测量,且需要测量人员长时间在起重机主梁上进行高空作业,不仅危险性高,还受到较大的主观性影响;全站仪法受到主梁测量点的颜色和环境光线影响,有时无法测得数据,精度也受到影响,且两种方法都需要进行人工记录大量的测量数据,容易出现差错或者数据丢失。
最近几年随着物联网技术的迅猛发展,国内外出现了将物联网技术引入特种设备检测行业应用的案例,例如江苏省特检院的周超等,将起重机的吊重、限位状态、偏斜量等参数通过传感器与LoRa、5G等通讯技术进行实时监控与上传。为了改善现有方法测量起重机主梁下挠值的不足,本文借鉴此种思想,提出一种利用水平激光进行测量的方法,设计了一套光电测量系统,该系统可以在较少的人工工作量下对起重机主梁的下挠值进行测量,并将测量数据通过LoRa和5G无线通信技术实时上传到云端,不仅解决了测量主观性影响大、精度低的问题,还实现了测量数据实时上传云端数据中心储存,比现有方法更加高效与智能。
1、水平激光测量方案设计
1.1测量原理
起重机主梁在制造出厂时留有一定预拱的目的是使其将来载重时有更多的下挠值裕量,以抵消将来在起吊作业中梁自重、起重物产生的下挠,从而提高载重能力、使用寿命等力学性能。一些大型门式起重机的跨度一般在80~100 m左右,从该起重机下方观察和在主梁上方观察时均可见微小的拱度,如图1所示。


图1 起重机主梁及其拱度
经纬仪法的测量原理是主梁上部分别架设经纬仪和标尺,起吊重物前观测一次经纬仪十字线位于标尺的位置,起吊并保持重物悬空再次观测十字线的位置,取两次的差值为下挠值,其测量原理如图2所示。
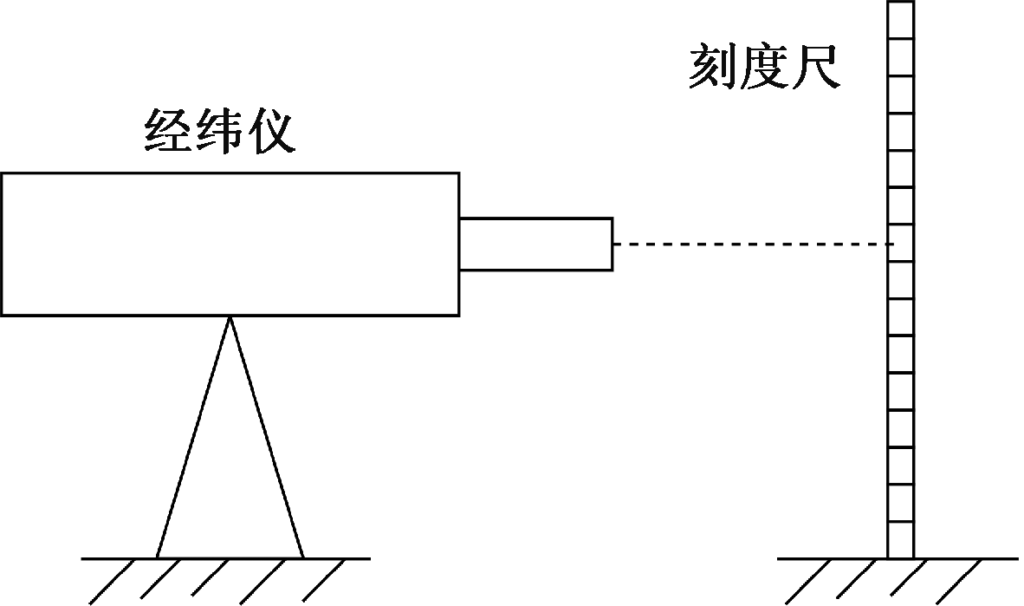
图2经纬仪法示意图
仿照经纬仪法测量的原理,设计一种基于水平激光与光电传感器的测量方法,通过水平激光代替经纬仪的观测视线,光电传感阵列代替标尺,对起重机主梁进行两次拱度测量。将大功率激光器通过两组高精轴承和悬吊式机械结构,使其发射出的激光束在晃动稳定时保持水平,并可以在减速电机的带动下缓慢旋转,使得激光束可以覆盖同一高度的整个水平面。将上述部分安装在工业遥控小车上,并遥控其行驶到起重机主梁上的各个待测点,记录水平激光束照射在光电传感器阵列上的光斑位置高度变化从而测量起重机主梁待测点的拱度,测量时的工作示意如图3所示。
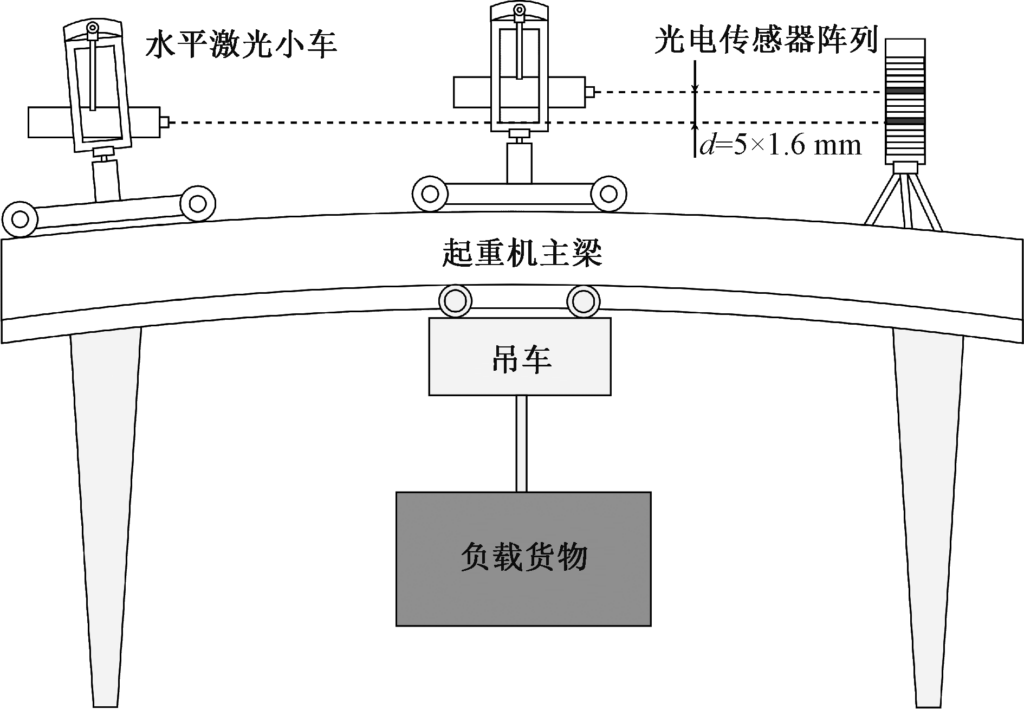
图3水平激光测量法原理示意图
1.2测量方法及流程
在进行测量时,激光器在减速电机的旋转带动下发出的光束缓慢扫过一整个水平面,光斑在光电传感器阵列上扫过。激光源距离传感器阵列较远时,例如80m时,有效的光斑覆盖面近似一个直径为2cm左右的圆形,在扫过传感器阵列时会覆盖相邻的几个感光单元,如图4所示。
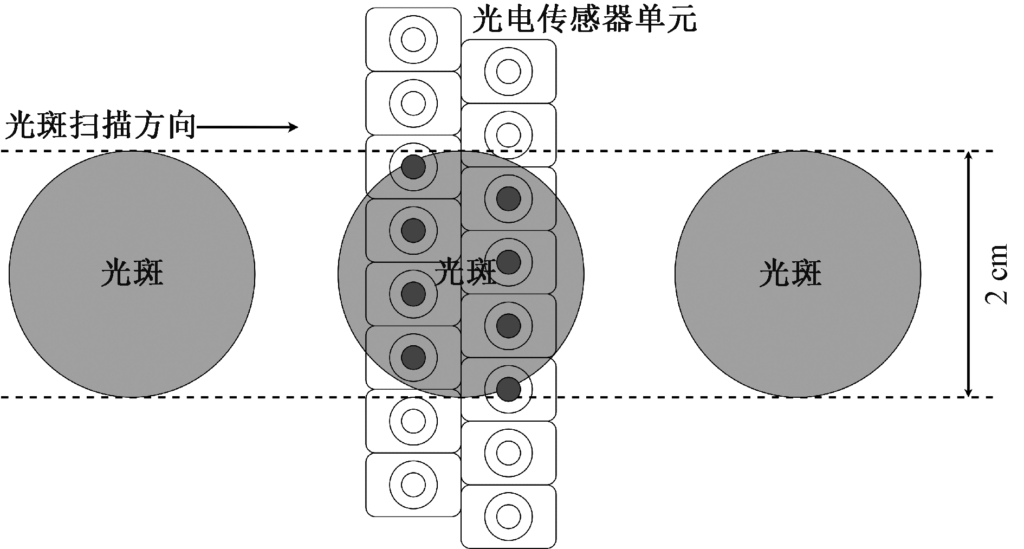
图4光斑扫描过程示意图
激光器距离光电传感器阵列较近时,例如10m时,光斑直径会缩小至0.5cm左右,因此无论是激光器距离光电传感器阵列较远处还是较近处,都取被光斑覆盖到而触发的感光单元的中间位置作为激光束的理想点位置,实现方法是记录下光斑在一次扫过光电传感器阵列过程中触发过的最高点与最低点的感光单元,再取两点的中间点为理想点,在硬件电路上具体的实现流程如图5所示。
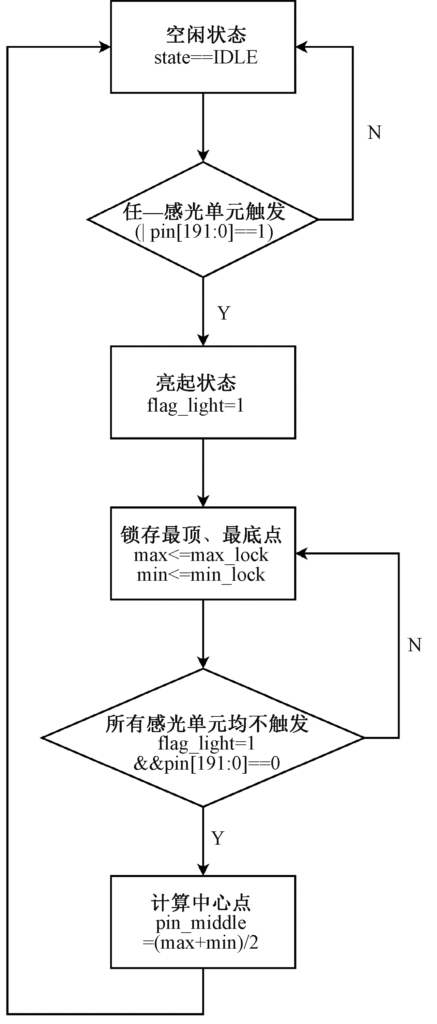
图5测量计算流程图
1.3水平激光器设计
水平激光器整体由3部分组成,分别是激光发射器、悬吊结构以及减速电机。选择500mW大功率激光器作为激光源,通过透镜组将点状光斑进行聚焦,使得光斑尽可能小,从而使光斑亮度尽可能高,调整至80m处的光斑直径在2cm左右时,可以使得在白天自然光环境下,光斑亮度仍然远高于自然光照射的亮度,将触发输出的亮度阈值设置在自然光亮度与光斑亮度之间,尽可能避免自然光照射导致的误触发。激光器通过悬吊结构保持水平,悬吊结构是由垂直的两根轴与相应轴承组成的,通过调整激光器与悬吊结构的中心固定位置,使激光器发射出的激光束在晃动稳定后保持水平。减速电机的转速为固定的2r/min,其带动激光器缓慢旋转,使点状光斑可以在水平面内扫描,达到和一字线光斑类似的效果,这样可以保证点状光斑一定可以扫过光电传感器阵列,并且避免了一字线光斑亮度太低,能量密度不够触发感光单元的问题,其3D设计模型如图6所示。
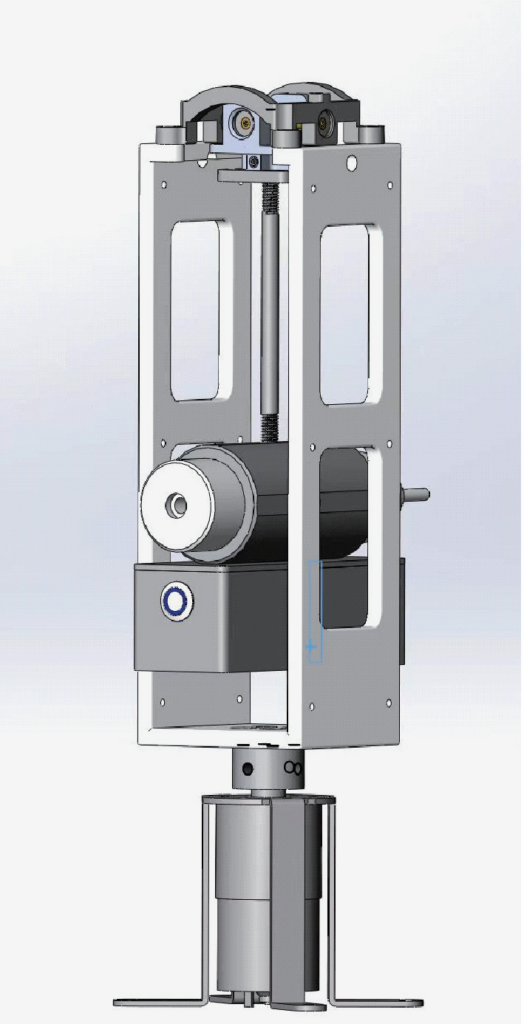
图6水平激光器3D图
2、系统硬件设计
2.1硬件总体构成
系统硬件电路主要分为4个部分,分别是传感器电路、调理电路、FPGA核心电路以及传输电路。传感器电路主要由192个PT3528封装的光电传感器组成,其作用是感光并输出电压;调理电路主要由48个四输入输出的电压比较器组成,其作用是比较感光电压与阈值大小并输出逻辑电平;FPGA核心电路由Altera的EP4CE55F23I7芯片通过六层PCB布局布线实现,其作用是接收逻辑电平信号并计算处理;传输电路主要由LoRa模块组成,其作用是将FPGA处理后的数据通过LoRa无线点对点传输到5G路由器的串口输入;4部分分别通过锂电池和线性稳压器提供相应的工作电压,设计框图如图7所示。
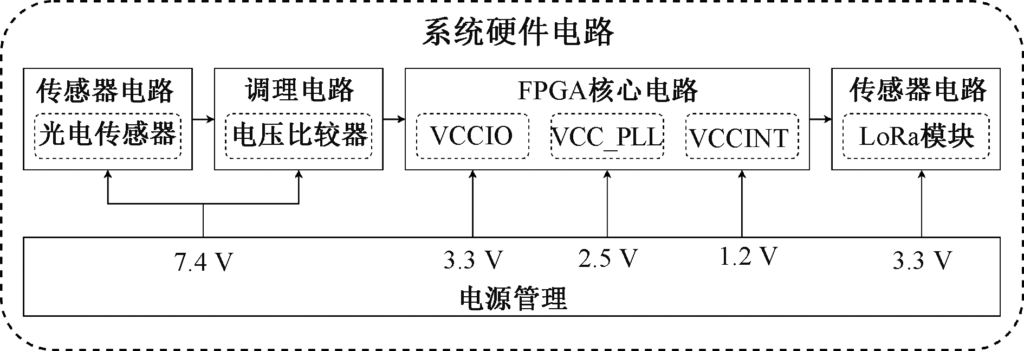
图7系统硬件框图
2.2光电传感器阵列设计
光电传感器阵列主要由传感器电路以及特殊的带狭缝的外壳组成。传感器电路通过将192个宽度为3.2mm的光传感器单元以两列交错间隔排列的方式在纵向上形成最小分辨率为1.6mm的感光阵列,当光电传感器单元感光时,输出电压与感光的光强正相关,通过48个4输入比较器LM339,将192路输出电压与设置好的阈值进行比较,即感光强度超过阈值时比较器输出逻辑电平1,并将此电平输入FPGA的I/O口进行后续处理,此部分的电路原理只画出了起始的两路和最后一路,中间省略了相似的189路,如图8所示。
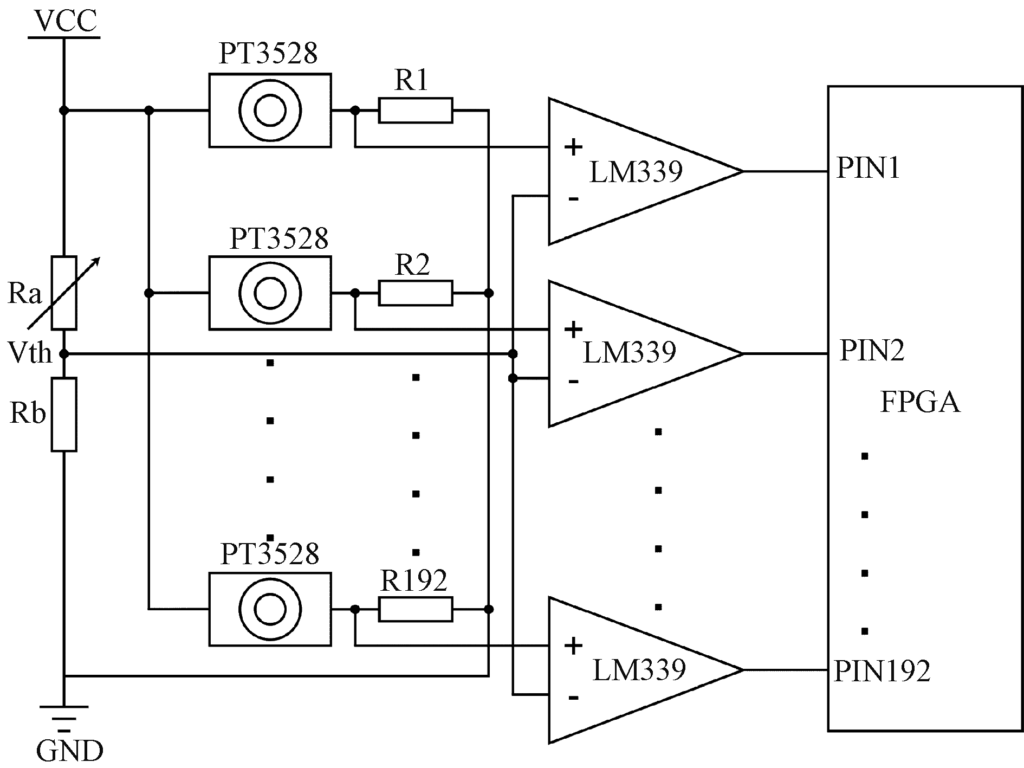
图8光电传感器阵列电路原理图
为了避免环境中的自然光对光电传感器影响造成误触发,将外壳设计为不透明且带狭缝的形状,并且在狭缝处用红光650nm带通滤光片进一步过滤环境中的杂光进入,使得测量系统所使用的激光器发射的650nm红激光成为感光的目标光谱波段,外壳的3D模型以及其内部部分电路板PCB模型如图9所示。
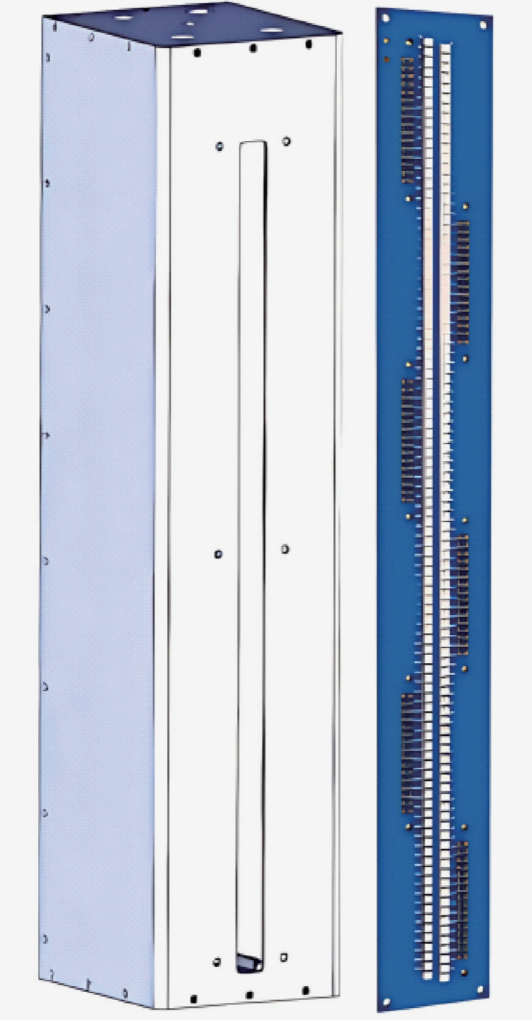
图9 光电传感器阵列3D图
2.3数据传输系统设计
系统整体的数据传输过程是:先通过LoRa进行较短距离的点对点无线透传,将数据从光电传感器阵列传输到5G工业路由器的RS485串口,再通过5G工业路由器上传到云端服务器,此数据传输过程采用了modbusRTU协议,协议中的CRC-16校验可以确保数据传输的正确性。系统的通信数据链路示意如图10所示。
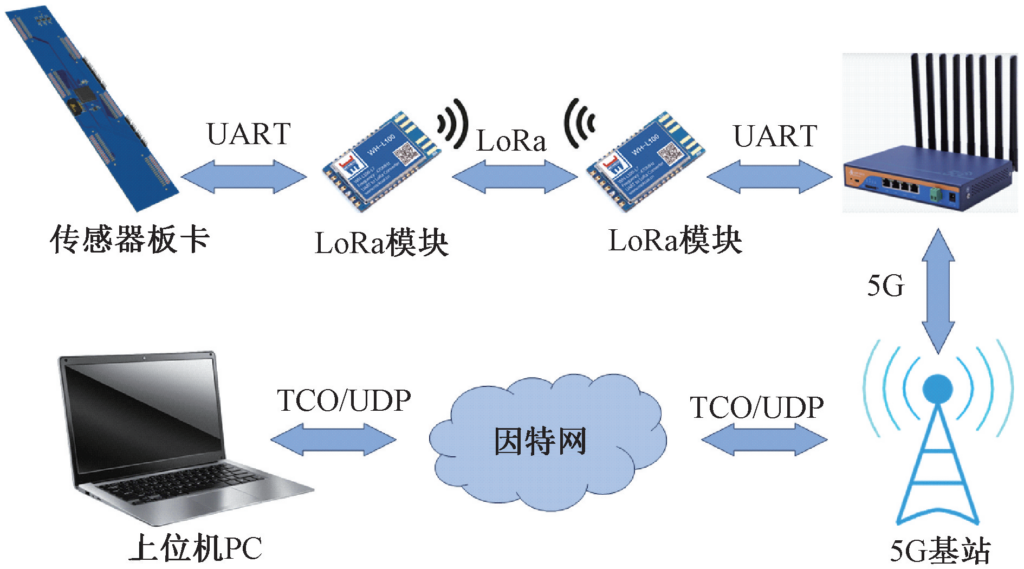
图10数据传输链路示意图
3、实验及应用
3.1水平激光校准实验
目前测量行业中,常使用准直激光来进行机械定位测量,本文所设计的水平激光源所发射出激光束的水平度直接影响测量精度,因此对悬吊结构下的大功率激光器进行校准是必要步骤。建筑行业中使用的高精度激光水平仪,其水平角精度可以达到小数点后3位的度数,即80m处高度仅偏差毫米量级,因此可使用其作为基准对本文所设计的激光器水平度进行校准。将激光水平仪和本文所设计测量系统的水平激光器同时照射在一面距离较近处(0.1m左右)的背景墙上,并调整水平激光器的重心固定位置使其光斑(红色点状)与激光水平仪的光斑(绿色十字)处于同一高度,如图11所示。
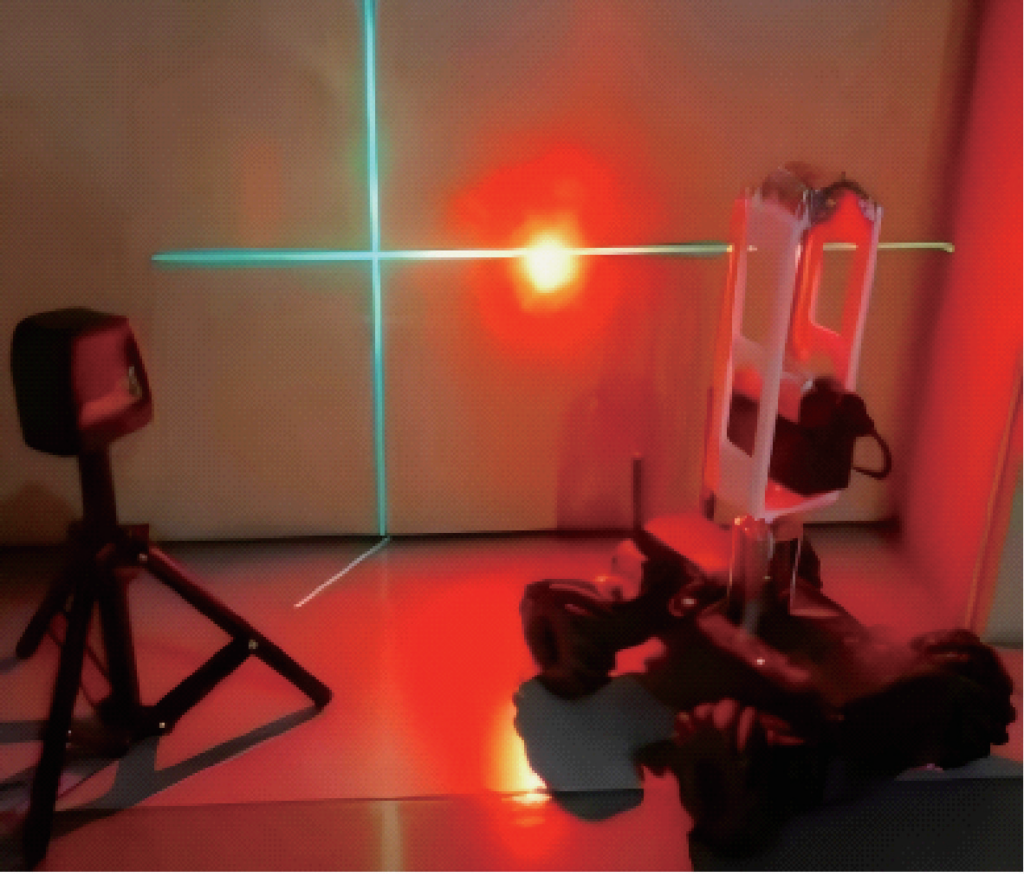
图11近点光源高度校准
再将两者的光斑照射到较远处(80m左右)的背景墙上,再次观察光斑高度是否一致,若不一致则通过微调水平激光器的重心固定位置,直到较远处的光斑高度也一致,即可保证至少80m范围内激光器所发出的光束是水平的,如图12所示。
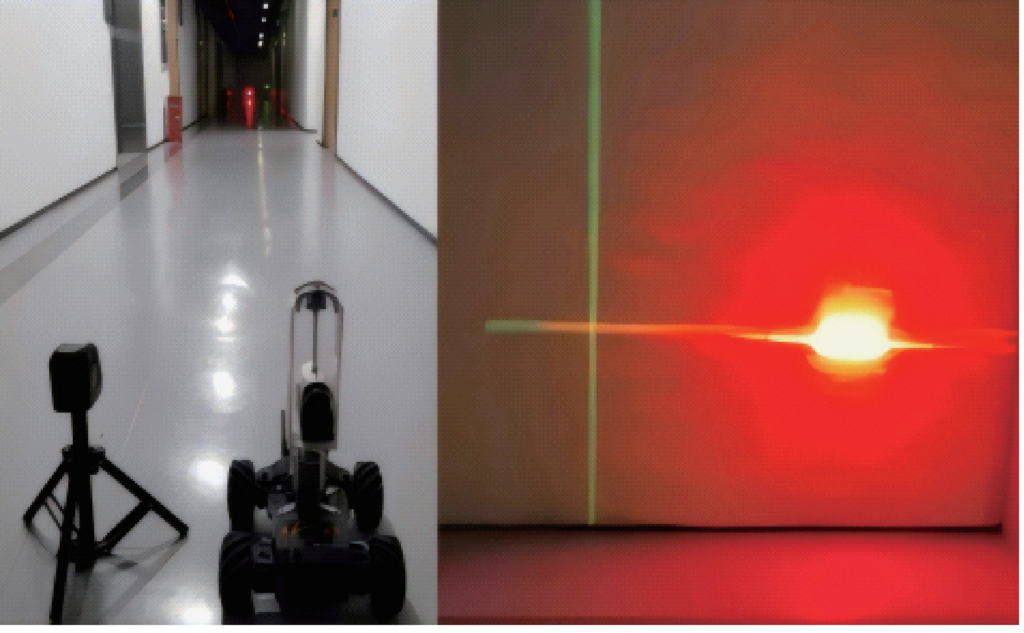
图12远点光束水平校准
3.2光电传感阵列环境光影响测试
由于实际情况下部分大型门式起重机的工作场所处于室外,起重机进行定期安全检测的工作一般也在白天进行,而本文所设计的测量系统是基于对激光器发射的强光进行感光作为测量的手段,因此必须要考虑检测现场的环境光是否会对测量产生影响。
分别在室外阴天、室外晴天以及太阳光照射方向不同的情况下进行环境光误触发实验,如图13所示。

图13环境光影响测试
实验结果表明除了晴天太阳光直射在光电传感器阵列狭缝上的情况下会导致误触发外,其余情况都不会导致误触发,这说明本文所设计地测量系统样机能够对处于室内的起重机全时间段进行测量;对处于室外的起重机在阴天时也能够可靠地进行测量;如果特殊情况下需要在晴天对室外的起重机开展检测工作时,可以人为进行简单的遮光处理(例如在光电传感器阵列上方放置遮阳板)即可避免环境光影响正常进行测量,如图14所示。

图14向光时使用遮阳板示意
3.3起重机主梁测量实验与对比
起重机主梁智能化激光测量系统最终的实物样机分为四部分,分别是水平激光遥控小车、光电传感阵列接受发射器、工业5G路由器以及PC上位机,如图15所示。
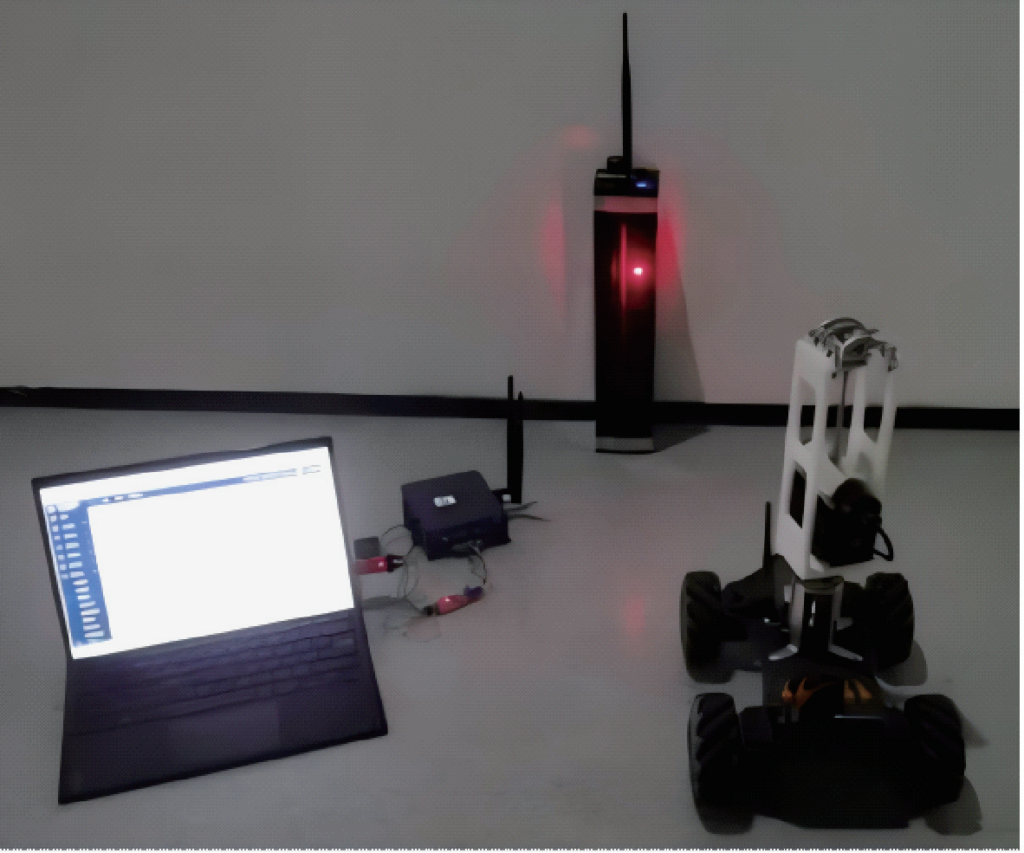
图15系统样机实物
将整套样机设备于某大型门式起重机主梁上进行测量实验,所测得的数据在云端服务器平台上可以直接进行数据查看和可视化,空载时得到的9个测量点的感光单元序号数据以及数据可视化后的曲线如图16所示。

图16空载测量数据可视化
载重时以同样流程进行第2次测量,将两次测量分别得到的9个测量点的感光单元序号对应相减,再乘以每个感光单元的宽度1.6mm即可算出各点的下挠值,如表1所示,由此可以根据相应国标要求判断所检测的起重机主梁是否达标。
表1水平激光法测量结果
| 检测点位 | 空载时感光单元序号 | 载重时感光单元序号 | 下挠值/mm |
| 1 | 22 | 21 | 1.6 |
| 2 | 40 | 38 | 3.2 |
| 3 | 55 | 51 | 6.4 |
| 4 | 64 | 54 | 16.0 |
| 5 | 72 | 59 | 20.8 |
| 6 | 63 | 52 | 17.6 |
| 7 | 55 | 47 | 12.8 |
| 8 | 41 | 39 | 3.2 |
| 9 | 20 | 19 | 1.6 |
为了验证本文所设计测量系统的性能,再分别采用传统的经纬仪法和进行测量并对比数据,所测得相应测试点的数据对比如表2所示。
表2测量结果对比
| 检测点位 | 水平激光法测得下挠值 | 经纬仪法测得下挠值 | 误差 |
| 1 | 1.6 | 1.3 | 0.3 |
| 2 | 3.2 | 2.8 | 0.4 |
| 3 | 6.4 | 5.9 | 0.5 |
| 4 | 16.0 | 16.3 | 0.3 |
| 5 | 20.8 | 21.4 | 0.6 |
| 6 | 17.6 | 18.0 | 0.4 |
| 7 | 12.8 | 12.3 | 0.5 |
| 8 | 3.2 | 3.5 | 0.3 |
| 9 | 1.6 | 1.5 | 0.1 |
测量的实验结果表明,所测的9个测量点使用本文所设计的起重机主梁下挠值智能化激光测量系统和使用传统的经纬仪法相比误差在本次实验中均小于0.6mm,完全可以满足测量精度要求,而相比测量用时,在同一专业检测人员操作下,本文所设计的测量系统完成整个测量用时10min左右,经纬仪法由于需要每个测量点架设经纬仪和人工读数、记录等操作,总用时30min左右,比传统的经纬仪法用时减少70%左右,且本文所设计的测量系统所测得的数据直接上传至云端数据中心,方便进行后续的处理、保存等。另外对比例如江苏省特检院的周超等所设计的起重机实时监控系统,本文所设计的测量系统无需对特种设备本体添加安装任何器件,避免了对待检测特种设备预先安装例如应变传感器等的工作,真正实现了对任意待测设备随时抽查的效果。
4、结论
本文总结对比了现有的起重机主梁拱度测量方法,指出了现有方法的不足,提出了利用水平激光束进行测量的智能化起重机主梁拱度测量方法并设计了测量系统,并进行了现场对比实验,测量精度与正确性经过与现有的经纬仪测量法进行对比,可认为测量结果可靠,且用时显著低于经纬仪测量法。本文所提出的测量方法和所设计的系统以其测量结果的可靠性、操作流程的高效性以及高智能化程度,显著提升了特种设备检测领域中起重机主梁检测的能力和效率,同时也为其他检测领域例如桥梁、道路、楼房等检测等提供了新的技术手段。


{kind=link}