

基于黑盒测试的智能起重机电气系统功能安全
1. 引言
随着工业4.0和智能制造的推进,智能起重机的广泛应用显著提升了生产效率,但其复杂的软硬件耦合失效机制(如可编程逻辑控制器内部软件缺陷)导致安全事故频发。传统基于系统内部结构的风险评估方法(如IEC 61508)因技术资料缺失难以实施。本文提出基于黑盒测试的评估框架,通过外部参数观测与动态权重调整,实现起重机安全风险的量化分析。
2. 基于黑盒测试的风险评估方法
2.1 黑盒测试原理
将起重机电气系统抽象为输入-输出系统,通过设计覆盖所有潜在失效模式的测试用例,采集关键输出参数(如电机电流、执行机构位移等),利用参数偏差值(实测值与期望值之差)评估系统健康状态。
2.2 负向函数量化分析
采用负向函数(式1)将参数偏差值转换为无量纲评分:
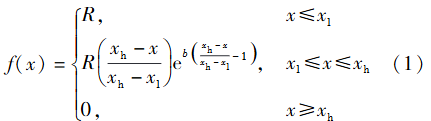

其中,(x = P – P_e)(偏差值),(x_l)和(x_h)为偏差范围,(R)为评分范围(0~100),(b)为形状参数((b=0)时为线性处理)。
2.3 动态权重调整策略
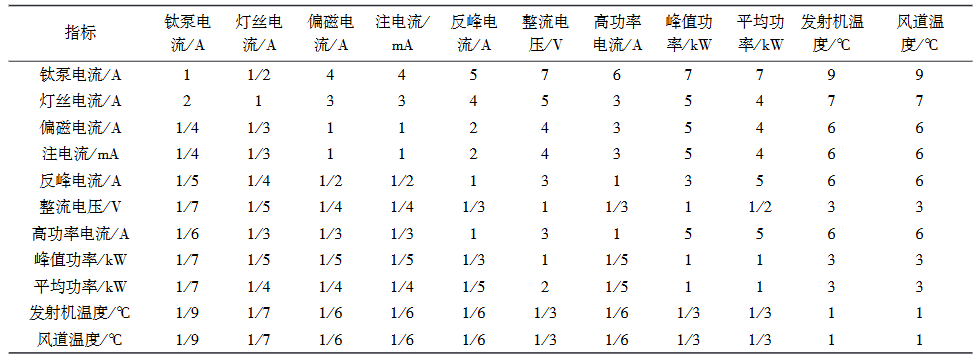
(1)静态权重:通过层次分析法(AHP)构建判断矩阵,计算最大特征值对应的归一化特征向量(表7)。
表 7 依据层次分析标度结果
(2)动态修正:
超出预警值的参数权重按比例增大(式7-8);


超出报警值的参数权重通过指数修正(式9),突出异常参数的影响。
wi = ewi0 (x -α/β -α),i ∈ C (9)
2.4 综合评分模型
[D_{\text{sys}} = \sum_{i=1}^{n} w_i \cdot D_i]
其中,(w_i)为动态调整后的权重,(D_i)为参数评分。风险等级划分见表4。
表4风险等级与评估分数对应关系
| 风险等级 | 评估分数 |
| Ⅰ低风险 | 85~100 |
| Ⅱ一般风险 | 70~85 |
| Ⅲ中等风险 | 50~70 |
| Ⅳ重大风险 | 0~50 |
3. 案例验证
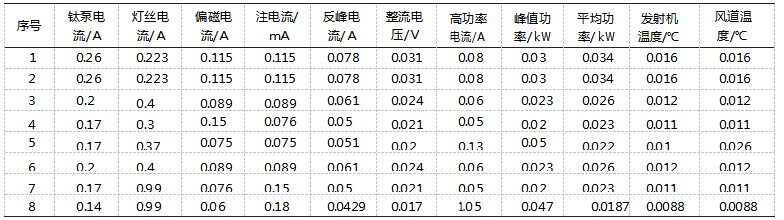
以雷达发射机为对象(表5-6),通过11项特征参数验证方法有效性:
(1)静态权重计算:判断矩阵一致性比例CR=0.059<0.1,满足要求(表8)。
表8各项特征参数对应静态权重

(2)动态权重调整:对超出报警值的参数(如灯丝电流、高功率电流)权重显著提升(表9)。
表9各项特征参数的动态权重
综合评分结果:动态权重下综合评分更敏感反映异常状态(表10-12),与专家评估结果一致。
表10各项特征参数的评估分数
| 序号 | 钛泵电流/A | 灯丝电流/A | 偏磁电流/A | 注电流/mA | 反峰电流/A | 整流电压/V | 高功率电流/A | 峰值功率/kW | 平均功率/kW | 发射机温度/℃ | 风道温度/℃ | 综合评分 |
| 1 | 97.8 | 96 | 88.66 | 92 | 99.77 | 96.7 | 86 | 88.7 | 81.5 | 86.3 | 86.7 | 93.47 |
| 2 | 97.3 | 96 | 88.66 | 91.2 | 98.7 | 93.3 | 86 | 88.7 | 93.5 | 86.3 | 86.7 | 93.34 |
| 3 | 97.2 | 66 | 91.7 | 98 | 98.7 | 96.7 | 90 | 84.3 | 73.25 | 96 | 95 | 82.93 |
| 4 | 97.8 | 66 | 40 | 56 | 98.7 | 100 | 89.7 | 51 | 52 | 96 | 94.3 | 70.87 |
| 5 | 98.9 | 46.7 | 73.3 | 34 | 98.9 | 93.3 | 88.7 | 35 | 62.75 | 96 | 23.3 | 60.34 |
| 6 | 98.9 | 36.66 | 91.7 | 34 | 98.8 | 100 | 89.3 | 98 | 85.25 | 96 | 96.7 | 66.47 |
| 7 | 99.4 | 19.33* | 90.3 | 0 | 98.7 | 96.7 | 85.33 | 94.33 | 93.5 | 89.33 | 90.33 | 49.57 |
| 8 | 99.1 | 19.33* | 23.3 | 0 | 98.7 | 96.7 | 43* | 5.3 | 73.25 | 96.7 | 90 | 34.6 |
注:评估分数为0的项代表该项的偏差值超过了偏差的边界值标注∗的特征项代表该项超过了报警值对其动态权重进行了较大的调整
表11采用固定权重以及动态权重的综合评分结果比较
| 设备号 | 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 |
| 固定权重 | 92.41 | 92.63 | 88.88 | 74.51 | 70.20 | 78.68 | 71.14 | 52.79 |
| 动态权重 | 93.47 | 93.34 | 82.93 | 70.87 | 60.34 | 66.47 | 49.57 | 34.6 |
表12雷达发射机风险等级结果比较
| 序号 | 参考文献结果-健康度 | 本文评估结果-风险等级 |
| 1 | 健康 | Ⅰ |
| 2 | 健康 | Ⅰ |
| 3 | 注意 | Ⅱ |
| 4 | 警告 | Ⅲ |
| 5 | 警告 | Ⅲ |
| 6 | 警告 | Ⅲ |
| 7 | 故障 | Ⅳ |
| 8 | 故障 | Ⅳ |
4. 结论与展望
本文提出的黑盒测试法结合动态权重调整,解决了智能起重机内部结构不透明的评估难题。案例验证表明该方法能有效量化风险等级,但需进一步通过多场景数据验证其普适性。未来可结合机器学习优化权重分配,提升评估实时性与准确性。


{kind=link}