

自动化门座式起重机智能识别系统
近年来,干散货航运市场的持续发展使干散货港口的年吞吐量维持在较高水平。作为干散货供应链的关键节点,干散货港口承担着储存和加工的任务,负责海陆之间的中转装卸工作,进而对港口的货物处理能力提出了更高的要求,并对装卸效率构成了挑战。此外,现代工业设备的工作条件较为恶劣,自动装卸设备通常需要在高负荷和高精度的条件下进行连续运转,该现状催生了对智能管理和自动作业的需求。
为了有效应对智能管理和自动化作业的需求,本文提出一套具有自主知识产权的创新解决方案:基于机器视觉的自动化门机智能识别系统。该系统集图像识别和激光扫描技术于一体,利用3D激光雷达和高清识别相机,能够实现抓斗的实时跟踪与定位、船舱内与甲板建筑物的点云数据传输、卸料斗和集卡的精确定位以及抓斗移动轨迹中障碍物的判断。通过相关技术,该方案能够实现门机操作的智能化、无人化和动态化,有效提高港口的装卸效率和作业安全性。此外,该智能识别系统方案应用先进算法,用于处理和分析从雷达和相机收集的数据,确保操作的高效性和准确性,能够自动适应不同的工作环境和条件,具备良好的灵活性和扩展性。同时,通过实时监控和动态调整作业流程,该方案能够提高作业效率,降低人为错误的风险,确保作业过程的安全性和可靠性。
1、系统总体设计
1.1设计原则
第一,安全性原则。系统充分考虑港口作业中的各种干扰因素以及工况中的风险项,采用门机抓斗异常状态检测、安全区域检测、障碍物检测等检测手段,有效控制风险,排除干扰因素。第二,精确性原则。系统采用多重激光雷达和多重视觉检测手段,保证其在各种环境下均能够互相补充,识别盲区,并确保识别结果的高精度。第三,易维护原则。系统拥有高度的可拓展性,并且各子系统间较为独立,能够满足后续升级和故障排除的需求。
1.2系统架构
自动化门机智能识别系统包含安装在维修平台的三台激光雷达、两台摄像机、一台云台、一台光纤交换机和全球定位系统(GPS)模块以及安装在主控室的一台光纤交换机、一台工控机,并将处理后的信息与可编程逻辑控制器(PLC)通信。维修平台上可以设置一个电器箱,用于安装光纤交换机和提供220V电源。
1.3系统硬件配置
自动化门机维修平台安装如图1所示。其中,维修平台上面搭载了所有的观测设备。旋转云台:在维修平台中心正下方安装,实时计算和垂直矫正GPS计算获得的象鼻梁倾角数据,保证云台始终保持竖直向下,确保雷达和摄像机能够获取有效的扫描范围。激光雷达:在维修平台两侧各安装了一台激光雷达,分别交叉覆盖维修平台正下方,沿着象鼻梁方向(径向)扫描,获取抓斗实时位置。一台激光雷达安装在旋转云台上,沿抓斗行进路径方向(切向)扫描,检测抓斗行进路径上存在的障碍物。三台激光雷达交叉覆盖式扫描象鼻梁顶端正下方的作业区域。摄像机:在维修平台下方安装两台摄像机,分别负责对下方工作区域进行抓斗定位和舱内流动机械识别。


图1自动化门机维修平台安装
2、系统工作流程
2.1海侧作业工作流程
海侧部分主要包括工作模式和待机模式。工作模式包括实时扫描模式、局部扫描模式、整体扫描模式。在自动化作业开始前,需要进行一次整体扫描,再开始实时扫描。每次作业循环中,在抓取物料前,还需要进行一次局部扫描。
- 局部扫描模式:自动化识别系统接收激光雷达的扫描数据和视觉相机的图像数据,并进行相关的数据滤波、网格化等初步处理,得到船型信息并将结果发送给PLC。船型信息包括舱口位置、舱内物料、舱内物料点云、舱内流动机械位置等。
- 整体扫描模式:与局部扫描模式的数据处理与传输流程相同,输出的船型信息增加了船舱附近障碍物位置与船体倾斜程度。
- 实时扫描模式:自动化识别系统接收激光雷达的扫描数据和视觉相机的图像数据,并进行相关的数据滤波、网格化等初步处理,得到抓斗的位姿信息并将结果发送给PLC。抓斗位姿信息包括抓斗位置、角度、加速度等。
- 待机模式:自动化识别系统在无作业状态下会转动云台到待机位置,减少雷达和相机因环境导致的污染,避免相机的图像数据模糊和遮挡雷达扫描数据。
2.2路侧作业工作流程
路侧部分主要包括卸料斗与集卡。在门机准备工作阶段,将激光雷达和摄像机组成的智能识别系统运行到卸料斗工作区域上方,扫描与识别卸料斗初始位置,并确定工作区域内卸料斗的唯一位置作为初始位置。在门机实时作业阶段,当抓斗运动到路侧卸料斗上方附近时,智能识别系统识别并获取工作区域内卸料斗的实时精确位置,并传递到PLC;当抓斗运动到目标卸料斗正上方时,智能识别系统确认卸料斗下方是否存在停留集卡并将结果传递给PLC,若存在工作集卡则进行自动化开斗作业,否则进入人工确认是否开斗。
2.3安全防护流程
在抓斗抓取物料后移动到卸料斗正上方完成卸料前以及抓斗卸料完成后到下一次抓取物料前,系统会在抓斗运动轨迹上进行障碍物判断,如果存在障碍物,会向PLC发送报警信号。
3、实际运行情况展示
在实际运行中,该系统能够识别门座式起重机抓斗在路侧和海侧时的各目标。在程序实际运行中,黑色的点为激光雷达的扫描点云,黑色的线为门机的中轴线,会实时输出雷达点云帧的刷新率。程序中的点云监视界面可以直观地观测门座式起重机的运行现状,以便进行故障排查和工况检测。
扫描点云(海侧)如图2所示,是一张点云识别结果的侧面可视化窗口截图。其中,可识别船舱口的内外边缘坐标;框内为抓斗,识别结果包含抓斗的顶部中心点坐标和抓斗相对于钢丝绳上端固定处的摆动角度以及钢丝绳伸出的长度。系统采用深度学习与传统方法相结合的方式识别抓斗,可应对较为苛刻的工况。
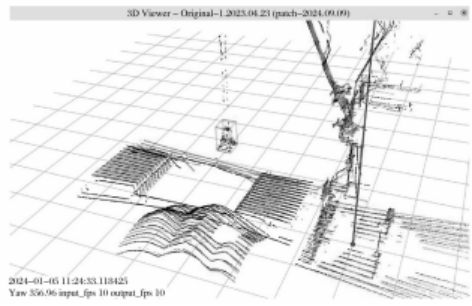
图2扫描点云(海侧)
门座式起重机抓斗在海侧时,点云的俯视图界面能够显示船舱口的四条边坐标。在门座式起重机的整个抓卸料过程中,系统会在初次识别船舱时进行初始化,以确保默认参数的准确性,此时会得到舱口尺寸的准确值。依据该值,系统能够在雷达无法扫描整个舱口时根据其中三条边的位置推算第四条边的位置,以应对船舱口过大的情况。该识别结果会经过算法筛选和对比后选择更准确的数据输出,具备一定的稳定性。物料面在系统中会以三维可视化的方式呈现。门座式起重机抓斗在舱口上方时,会扫描舱内的物料面信息。其中,一片点云为实时物料面扫描结果,另一片为经算法拼接后的物料面,在一次扫描结束后输出完整的物料面信息。
扫描点云(陆侧)如图3所示,是一张抓斗位于陆侧时点云斜视图。其中,下方的框为卸料斗识别结果以及车辆识别结果,系统会输出车辆的位置与朝向等。
门座式起重机抓斗在陆侧时,系统的点云识别俯视图界面能够显示卸料斗的四条边坐标、能否下斗的确认信号、卸料斗下方是否存在车辆的确认信号。在后台输出卸料斗的四条边坐标,并且包含卸料斗开口面的中心坐标、卸料斗边缘与抓斗的距离安全性度量、下斗信号和卸料斗识别结果的置信度等信息。系统能够识别抓斗上安装的挡板,避免错误下斗。此外,若车辆未正确停放或车头朝向有误,系统将发出警示。同时,系统还能够监测抓斗与卸料斗边缘的距离,一旦超出安全范围,也会发出警告。
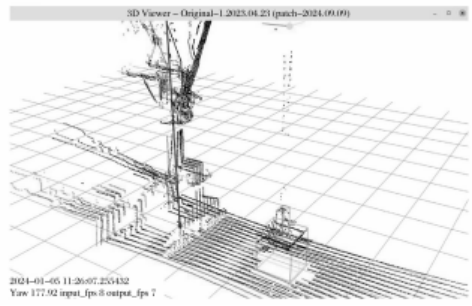
图3扫描点云(陆侧)
4、结语
港口装卸设备的自动化、智能化是未来的趋势,本文借鉴港口装卸设备的改造经验,提出一种兼顾安全性、准确性、实时性和易维护性的门座式起重机智能识别系统。该系统能够实时准确识别门座式起重机的抓斗位置、姿态。在海侧,其能够识别船舱口的边缘坐标信息、甲板厚度以及舱内物料面形状。在陆侧,其能够识别卸料斗的边缘坐标,并给出抓斗是否在卸料斗上方、卸料斗下方是否有车辆等控制信号。此外,该系统还具备可以人工确认舱口和舱口尺寸等相应的功能。经现场测试,该系统各项指标满足实际需要和设计要求。在后续的开发中,可以采取强化路侧识别子系统、使用更先进的视觉识别技术等措施,进一步提高识别的准确性,扩大识别范围。


{kind=link}