

卷钢堆场门式起重机定位系统设计研究
近几年,随着数字孪生、高精度定位、5G技术的快速发展普及,传统码头和铁路堆场也逐步开展了自动化、信息化改造,通过高新技术减少人工作业,提高工作效率,收集数据实现生产作业全过程把控。目前很多码头已经完成全自动化或半自动化改造,实现了集装箱装卸的远程控制,其中远程调度的关键技术就是通过在门式起重机加装北斗系统结合多种传感器、智能识别技术实现装卸机械和货物的高精度定位。对门式起重机的定位不仅可以掌握门式起重机位置,还可以据此推算出吊起的货物位置,得到的位置信息不仅可以为门式起重机的远程自动控制提供数据,也可用于货物的数字化仓储管理。
目前铁路的门式起重机自动化改造较少,除了作业环境无法像港口那样实现完全无人化外,较高的改造成本也是阻碍因素,但随着数字化浪潮的来临,铁路堆场智能化发展的方向是大势所趋,寻找一种较低成本的改造方式实现对传统门式起重机的自动化改造势在必行。
1、定位技术对比
目前,可用于门式起重机定位的技术主要有4种:差分定位、编码器定位、激光测距、超宽带定位,这几种技术有各自的优缺点和适用条件,具体如下。
差分定位技术是在卫星定位技术基础上建立基准站,利用基准站已知的精密坐标与接收机计算出的坐标计算坐标改正数,利用改正数对定位结果进行改正,降低误差,提高定位精度。差分定位直接获取三维坐标,精度最高可达到厘米级,广泛应用于室外定位,但卫星定位信号容易受遮挡影响,若将差分定位基站放置在门式起重机吊钩上,则门式起重机框架本身会对卫星信号产生影响,目前有将差分定位基站置于门式起重机移动小车上定位的应用,但无法实现吊具的高度测量。
编码器定位是一种安装在转动轴上,将轴的机械位移转换为电脉冲信号或者数字信号的传感器。编码器定位以其高精度、高分辨力、高可靠性被广泛应用于各种位移测量,也是门式起重机定位应用较为广泛的一种方式。编码器定位可以达到毫米级精度,能够通过测量位移信号实现吊具三维坐标的测量,但运用编码器定位需要对门式起重机进行改造,同时需要连线供电。
激光测距定位技术通过激光对目标进行距离测定,测距速度快,精度高,误差可控制在毫米级,抗干扰性较强,穿透性弱,被广泛应用于中远距离测距。
超宽带定位技术是一种全新的高精度测距定位技术,其本质是一种电磁波,通过测量定位标签之间的信号时间差推算距离,实现定位。超宽带技术的特点是传输速率高、带宽极宽、能量消耗少、抗干扰性强,信号传播距离在百米左右,测距精度10~30 cm。超宽带定位技术较广泛地应用于小范围室内一维、二维定位。
以上几种定位技术参数对比如表1所示。
表1定位技术参数对比
| 定位技术 | 差分定位 | 编码器定位 | 激光测距仪 | 超宽带定位 |
| 精度 | 1~10 cm | <10 mm | <10 mm | 10~30 cm |
| 范围 | >1 000 m | — | <500 m | <500 m |
| 穿透性 | 较弱 | — | 无穿透性 | 较强 |
| 改造成本 | 只需布设基站,可自供电 | 需要改造门式起重机并布设供电线和数据线 | 只需布设传感器,可自供电 | 只需布设基站,可自供电 |
对门式起重机吊具的定位不需要得到精确的经纬度坐标,只需要获取吊具相对门式起重机和场地所处位置即可,现场人员、设备较多,情况复杂,因此需要定位技术具备稳定性和一定的穿透性,并且应尽可能避免对门式起重机等现场设备进行改造或加设供电线。由表1可知,从精度、范围、穿透性、改造成本等角度分析,超宽带技术是最理想的定位技术。
2、超宽带定位系统技术原理
2.1超宽带测距算法选取
超宽带测距算法主要有单边双向测距法(SS-TWR)、双边双向测距法(DS-TWR)2种。单边双向测距是对单个往返消息时间上的简单测量,差值时间基于本地时钟得到,不同设备的本地时钟存在偏差,增加了飞行时间的计算误差,使得超宽带测距误差增大。双边双向测距方法通过记录2个往返的时间戳,最后得到飞行时间。与单边双向测距法相比,双边双向测距法虽然增加了响应的时间,但极大减少了设备间的时钟误差,降低测距误差,提高精度,因此选取双边双向测距法作为测距算法。
2.2定位系统设计
定位系统包含4个定位模块,利用4个定位模块的测距数据构建坐标系获取吊具坐标。吊具定位示意图如图1所示。图1中,C为主模块,A,B,D为从模块。A位于堆场端部,B位于门式起重机顶部端侧,C位于门式起重机的活动小车上,D位于门式起重机吊具上。A,B横向坐标一致;B,C纵向坐标和高度一致;C,D横纵坐标一致,其中B,C高度为H1,A高度为H2。C与A,B,D之间分别一一测距,测得的距离为Lac,Lbc,Lcd,利用已知量H1,H2和测量量Lac,Lbc,Lcd即可得出吊具坐标(x,y,z)。
x=Lbc(1)
y =[ L2ac– L2bc -( H1– H2)2]1/2 (2)
z=H1–Lcd(3)
三维坐标中,x,z可由测量值直接得出或测量值与固定值经过运算得出;y坐标由2个测量值Lac,Lbc和2个固定值经过勾股定理计算得到。由于2个测量值Lac,Lbc存在测量误差,因此计算得到的y坐标也存在误差。当y的值与Lac量级接近,即门式起重机距离A较远时,经过勾股定理计算的y误差与Lac误差接近;当y的值与Lac量级相差较大时,即门式起重机与A相聚较近时经过勾股定理计算后,因y与Lac存在量级的差距,Lac的误差值经过平方再开方后对y计算值影响较大,造成y误差较大,使得最终数据偏离实际值。因此,在实际应用时,应在A通过其他辅助方式进行近端测量,弥补近端误差较大的不足。
图1吊具定位示意图


2.3定位设备构成
定位模块包含超宽带模块、电池、无线模块、天线、远程开关、外壳。电池使得模块实现自供电,免除了布置供电线的麻烦,通过低功耗设计可以使模块运行较长的时间,超宽带模块负责模块间的通信及时间戳的记录,测距功能完成,测量结束后,主基站通过无线模块将定位数据发送至服务器,天线增加了信号传播距离。定位设备构成如图2所示。
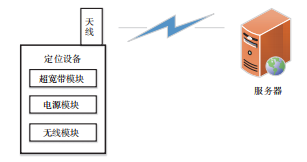
图2定位设备构成
超宽带模块基于DWM1000开发,在此基础上集成了STM32主控芯片、通信接口、三轴陀螺仪、加速度计、天线,可以实现一对多测距通信,可以对信号进行初步滤波处理。超宽带模块参数如表2所示。
表2超宽带模块参数
| 参数 | 指标 |
| 数据频率/Hz | 200 |
| 通讯距离/m | 100 |
| 信号波段/GHz | 3.5~6.5 |
| 最大数据包长度/b | 1023 |
3、定位试验测试
超宽带信号实质是电磁波,其传播途中会受到环境干扰,在复杂的局域环境下,超宽带定位精度、稳定性、数据重复性都可能会受到电磁信号、人体遮挡、环境遮挡等多种因素影响,为验证系统是否能在复杂环境下稳定运行,针对这些可能的影响因素,设计相应试验测试,对定位信号精度、稳定性、重复性进行验证和相应改进优化。
3.1信号稳定性测试
为测试信号稳定性,采集测距数据,采用信号稳定性测量系统,由2个超宽带模块进行一对一测距。信号稳定性测量系统如图3所示。
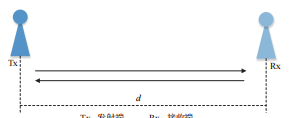
图3信号稳定性测量系统
现场应用中,3个方向的测量距离范围主要在10~20 m和40~100 m范围内,2个模块相距18.2 m,18.2 m信号原始数据如图4所示,图中信号波动范围25 cm左右,稳定性较差,噪声较为明显。
为提高信号的稳定性,需要通过低通滤波器来滤除高频噪声,得到更平滑稳定的数据,滤波效果既要保证高频杂波的滤除也要尽可能减小对低频信号的衰减。在此选取了一阶低通滤波器,经过校准测试,确定了滤波器参数,18.2 m信号滤波数据如图5所示,信号波动范围大大减小,基本能够达到滤除噪声的目的,稳定性增强。
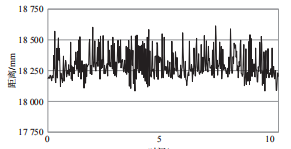
图4 18.2 m信号原始数据
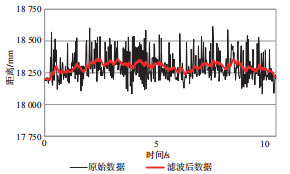
图5 18.2 m信号滤波数据
50 m信号滤波数据如图6所示,100 m信号滤波数据如图7所示,原始数据信号波动范围在20 cm以内,滤波后信号波动范围在5 cm左右。
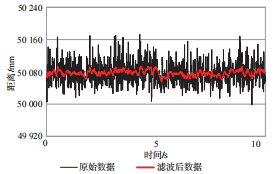
图6 50 m信号滤波数据
由试验结果可知,测距信号波动误差不随测试距离变化,经过滤波后全范围内误差基本保持稳定。
3.2人体遮挡试验
电磁波遇到障碍物会发生衍射,改变原有的传播方向。有研究结果表明,超宽带信号在传播过程中遇到人体的遮挡时,一部分信号会通过体表爬行波的形式沿着人体的表面进行传播,从人体的一侧传播到另一侧,这样使得传播时间变长,可能会造成测量数据大于实际距离数据。当人体没有处在超宽带模块的直线传播路径上时,不会对信号产生影响,但人体处在超宽带模块的直线传播路径上时会使超宽带信号产生衍射,影响数据精确性,同时,人体遮挡时与超宽带模块的距离大小也可能对数据结果产生不同程度的影响。为验证人体遮挡对信号的影响因素和影响力度,采用人体遮挡测量系统,由人体遮挡在超宽带模块信号传播路径上,改变人体与模块的距离进行多组试验,以观察不同距离的影响大小。人体遮挡测量系统如图8所示。人体与模块距离0.3 m时遮挡测距信号如图9所示,图中虚线左边为无遮挡数据,虚线右边为遮挡后数据,遮挡后测量数据比实际值增大约1.3 m。
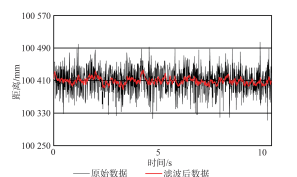
图7 100 m信号滤波数据
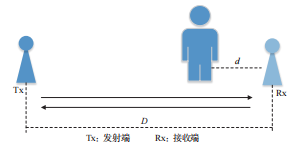
图8人体遮挡测量系统
为探究人体与超宽带模块距离大小对信号的影响,选取0.3 m,1 m,2 m,3 m,5 m,6 m共6种距离分别进行了试验,人体遮挡测试试验结果如
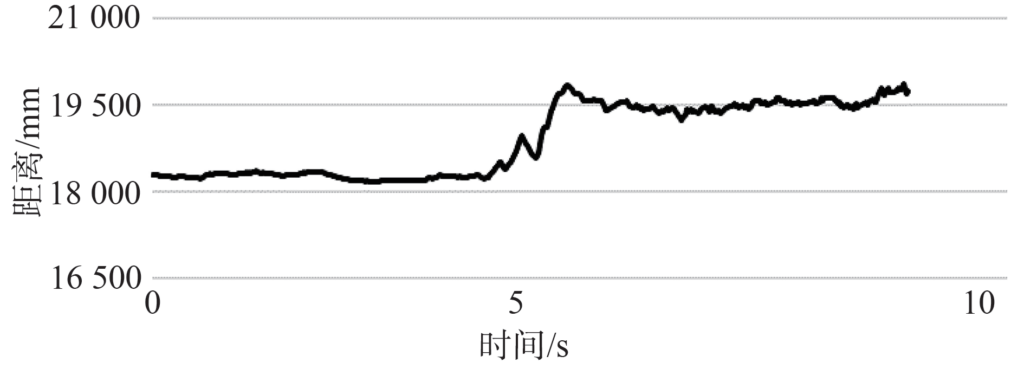
图9人体与模块距离0.3 m时遮挡测距信号
图10所示。由图10可知,人体遮挡会增大距离测量结果,但对数据的波动性影响不大,除了0.3 m时测距误差和波动较大,人体与模块距离大于1 m时,误差基本稳定在0.6 m左右。因此可以得出结论,人体遮挡会使超宽带模块测量距离偏大,人体距离超宽带模块1 m以上时,误差基本稳定在0.6 m,距离小于1 m时,误差更大。
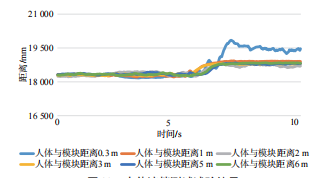
图10人体遮挡测试试验结果
3.3定位系统可靠性测试
实现门式起重机吊具精确定位要求定位系统误差小,重复性强,同一位置定位数据误差应该在0.5 m以内,为验证定位系统数据可靠性,依据图1吊具定位示意在门式起重机上搭建定位系统、实际测试定位精度和重复性,选定8 m×8 m的区域标记16个定点位置,测试区域示意图如图11所示,相邻点之间的距离为2m,在地面以白色贴纸标记位置,以激光垂直向下打点的方式让吊具对准位置,以左上角第一个点为原点建立坐标,将吊具挪动到相应位置后记录定位数据,通过反复挪动,每个位置均收集到10组数据,每组数据间均经历了门式起重机移动再复位,测试散点坐标图如图12所示。
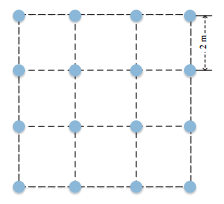
图11测试区域示意图
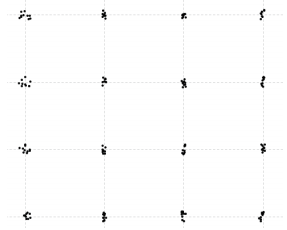
图12测试散点坐标图
图12中,测试散点的位置数据与标准位置误差最大约为20 cm,约半数误差在10 cm以内,可知虽然吊具经过挪动和变换,但同一位置测量数据重复性较好,误差在可接受范围内。
3.4定位系统现场试验
为验证系统的稳定性,系统样机在卷钢堆场进行系统测试,首先在堆场的门式起重机上布置定位模块,一个模块放置在地面,3个模块分别放置在门式起重机端部、移动小车底部、吊具上,确定好定位模块位置后对4个模块相对位置进行了测量,确定了坐标系原点及卷钢坐标计算公式和参数。定位系统现场测试如图13所示。现场实测中,定位系统的测距数据与激光测距仪测量数据相比误差在20 cm以内,且数据波动小,现场工况对定位数据稳定性、准确性不构成影响。

图13定位系统现场测试
4、结束语
基于超宽带测距定位技术,提出了一种适用于门式起重机的低成本吊具定位解决方案,方案依托高精度测距技术围绕门式起重机建立三维坐标,实现对吊具三维坐标的定义和获取。针对方案设计试制硬件模块,对模块性能进行了试验测试和优化。试验结果表明,超宽带定位技术用做门式起重机吊具定位合理可行,精度高、误差小、重复性强,不易受到外界环境干扰,但人体在传播路径上的遮挡仍会造成一定影响,使得测距结果偏大,定位数据偏离实际值。因此,在实际应用中,应通过合理架设模块,避免使用过程中人体的遮挡影响,保证定位系统的可靠性和精确性。


{kind=link}