

铁路伸缩臂救援起重机智能安全控制系统的研制
铁路救援起重机司机已越来越不满足于起重机仅仅拥有力矩限制功能,他们希望获得更多关于起重机状态的准确信息,并希望起重机具有一定的自动控制功能及自诊断能力,以减轻他们的操纵负担并保证起重机的安全。在研究分析国内外现有起重机安全监控系统的基础上,利用现代电子技术、计算机、传感测控技术等方面的技术成果,开发了新一代铁路起重机智能安全控制系统。该系统除具有力矩限制等常规功能外,还可以自动选择工况,有效地对下车部分进行监控,向司机提供全面的起重机状态信息,限动功能灵活多样,可实时存储起重机状态数据,具有黑匣子功能。为提高系统的先进性与可靠性,上车系统与下车系统采用了现场总线技术(CAN总线)进行通信;下车电气系统采用了模块化设计安装。系统采用12″中文LED显示器,人机界面友好,提供信息全面,方便司机操作。
1、铁路起重机安全控制系统现状分析
1.1 国产安全控制系统
目前,国产铁路起重机的安全控制系统均属于力矩限制器系统范畴,在安全控制功能上,只有采集和处理起重机的吊臂长度、吊臂角度、回转角度(仅提供±10°、±30°四个限位临界角度)、变幅油缸压力等信息,仅在起重机超载作业时发出报警及限动信号。国产起重机的安全控制系统主要存在以下问题:
 (1)系统缺少安全监控功能,不能检测支腿跨距状态、均载(弹簧闭锁)油缸状态、配重状态,司机只能根据地面操作人员的汇报手动选择工况,由于司机手动选择的工况往往与实际情况不符合而产生危险,致使起重机倾翻;
(1)系统缺少安全监控功能,不能检测支腿跨距状态、均载(弹簧闭锁)油缸状态、配重状态,司机只能根据地面操作人员的汇报手动选择工况,由于司机手动选择的工况往往与实际情况不符合而产生危险,致使起重机倾翻;
(2)系统向司机提供的起重机状态信息不全面,不能检测支腿支撑压力,不能检测起重机前后、左右两个方向的倾斜角度,不能显示起重机偏离轨道中心距离;
(3)系统控制功能单一,超载限动后5个危险动作(吊钩升、臂杆伸、变幅降、左/右回转)均不能动作,解除安全限动采用单独钥匙开关方式,解锁后起重机还能任意动作,不利于安全控制;
(4)系统不完备,无臂杆高度限动不利于电网下作业,无左、右侵界限动,不利于起重机安全作业;
(5)系统无数据记录功能,不能记录起重机工作时的状态数据,不能进行事故后的技术分析。
1.2 进口安全控制系统
目前,国内引进的进口铁路起重机均为德国KIROW公司生产的KRC1680型起重机,其安全控制系统采用的是德国赫斯曼(Hirschmann)公司为其开发的智能控制系统,它对起重机各机构的工作状态进行了全方位的智能安全连锁保护。司机发出的操作指令通过该系统进行数据解算和逻辑分析后,再控制起重机动作,进而在非允许动作状态发出报警及限动信号,使起重机只能向安全方向动作,实现了全面的安全智能联锁控制功能。但进口起重机在国内的使用过程中也暴露出以下不足:
(1)操纵和控制系统因其智能联锁控制方式导致系统操作程序复杂、动作较慢,对起重机司机操作水平要求过高,对设备维修水平要求也很高;
(2)安全控制系统限制因素繁琐,不利于查找排除故障,特别是在救援现场,出现小问题而不能快速判断处理,从而影响铁路救援工作快速开展;
(3)安全控制系统数据记录仪采用非实时记录的数据存储形式,即仅记录超载作业数据,不超载作业则不记录,所以同样存在数据记录盲区,不利于事故后数据分析;
(4)价格昂贵,系统复杂,不适用于既有国产铁路起重机的改造。
1.3 对比分析
根据铁道部运装机设[2008]165号文件要求,以及对起重机安全控制系统的要求,对国内外及拟设计的起重机控制功能进行了分析对比,结果如表1所示。从表1中可以看出,在起重机吊重作业过程中,进口铁路起重机能够根据起重机状态自动选择工况,能够实现对起重机各种作业状态的智能化保护,但存在操作复杂、动作迟缓、记录数据不全面等缺点,而且价格昂贵;而国产的起重机需要由司机确认支腿、均载(闭锁)油缸、配重等机构的实时状态,系统无法自动选择工况,而且下车缺乏有效监控,不能检测支腿压力、起重机水平倾斜角度和横滚角度,起重机状态信息提供不全面,与进口起重机存在很大差距。
表1起重机功能分析对比
| 序号 | 功能 | 德国进口起重机 | 操作与控制方式既有国产起重机 | 新一代智能安全控制系统 |
| 1限动功能 | 根据实际自动限制 | 超载时同时限制5个危险动作 | 根据实际自动限制 | |
| 2工况输入 | 自动输入 | 司机根据起重机状态手动输人 | 自动或手动输入 | |
| 3回转角度信号 | 自动-360°连续 | 仅提供±10°、±30°临界角度 | 自动-360°连续 | |
| 4支腿跨距信号 | 自动输入 | 司机根据地面人员汇报 | 自动输入 | |
| 5支腿支撑压力信号 | 根据总重和几何参数计算出分布各个支腿的压力 | 地面人工检查,系统无法测量支腿压力 | 根据支腿油腔压力传感器自动输入 | |
| 6闭锁油缸信号 | 自动输入 | 地面人工检查,系统无法测量油缸压力 | 自动输入 | |
| 7车体倾斜角度信号 | 自动输入 | 地面人工检查,观察车体水平仪 | 自动输入 | |
| 8配重挂放信号 | 自动输入 | 司机听取地面人员汇报 | 自动输人 | |
| 9配重伸缩信号 | 自动输入 | 司机听取地面人员汇报 | 自动输入 | |
| 10网下4.8m高度限动 | 有 | 无 | 有 | |
| 11左、右侵界限动 | 有 | 无 | 有 | |
| 12车体倾斜超限限动 | 有 | 无 | 有 | |
| 13支腿压力超范围限动 | 有 | 无 | 有 | |
| 14工作数据记录 | 仅超载时记录 | 无记录 | 实时记录 | |
| 15系统限动解除 | 电脑解锁+钥匙开关解锁 | 钥匙开关(大解锁) | 电脑解锁+钥匙开关解锁 | |
2、智能安全控制系统目标与功能
目前,国内铁路局各机务段配属的救援起重机多为国产伸缩臂起重机,其安全控制系统均是力矩限制器系统,功能单一,存在安全隐患。因此急需开发功能完备、价格适中、操作简便的安全控制系统,以满足铁路起重机对救援安全作业的要求。
2.1系统目标
基于上述分析,确定系统的总体目标为:开发一套功能先进、价格适中、操作简便的全智能铁路起重机安全控制系统。系统能自动选择工况,不需要司机手动选择,能有效对下车部分进行监控,向司机提供全面的起重机状态信息,限动功能灵活多样,并对工作数据进行实时记录和分析,确保铁路起重机作业安全。
2.2 系统主要功能
系统可根据需要进行多种形式的限动
①吊钩过卷限动:系统自动切断上卷扬、吊臂伸动作。
②左/右侵界限动:司机可自行设定臂杆端部、配重尾部偏离轨道中心的限动距离,超过该范围系统切断起重机左或右回转动作。
③臂杆高度限动:高度值可由司机确定,系统默认为4.8 m高度限动,限动时系统切断变幅升、吊臂外伸动作。此高度限动功能能满足在隧道内、接触网下工作的需要。
④超载限动:系统切断臂杆伸、吊钩升、变幅降危险动作,同时根据起重机回转角度做出判断切断左或右回转动作。
⑤水平倾斜限动:系统预设限动角度为±4°,超过该范围系统切断起重机所有危险动作。
⑥支腿压力超过工作范围限动:系统预设支腿压力工作范围为5 MPa~30 MPa,超过该范围系统切断起重机所有危险动作。
⑦系统一旦发生限动,均进行声光报警,给地面人员发出警示信号。
系统具有黑匣子功能
能实时存储起重机状态数据,每10 s存储一次,保存72 h内的工作数据(如起重机当前工况、吊重,臂杆长度、幅度,回转角度、支腿状态等),可通过笔记本电脑连接将起重机工作数据读出,以数据库表格形式保存,可以打印和显示。
显示功能
采用12″中文图形液晶显示屏,起重机全面状态信息可在一屏内以图表、文字的形式同时显示。
自动选择工况
系统工况选择分为自动和手动两种方式。自动选择情况下,系统根据实时检测到的信号自动进行工况和性能曲线的切换;手动工况下,司机根据起重机具体状态情况,对照起重机工况表进行工况选择。手动选择工况是自动工况的一种应急补充,在系统信号采集部分发生故障时,起重机仍能工作,而且还能起到力矩保护作用。
3、智能安全控制系统构成
起重机智能安全控制系统由上车控制系统与下车控制系统两部分组成。上车控制系统负责上车监控数据采集及限制功能的实现,上车系统包括上车系统主机、12″液晶显示器、一体式长度/角度传感器1套、变幅油缸油压传感器2个、回转角度传感器1个、车体水平倾斜角度传感器1个、吊钩高度限位开关及重锤1套、配重检测传感器2个。系统构成如图1所示。
下车控制系统负责下车监控数据采集与相关数据上传功能的实现。下车系统包括下车系统主机、支腿跨距检测传感器12个、支腿油压传感器4个、闭锁油缸压力传感器4个。下车系统构成如图2所示。下车控制系统通过CAN总线与上车控制系统进行通信,电信号通过安装在回转中心上的导电环传输,力矩限制器主机和显示器之间的数据传输也使用CAN总线通信。同时,CAN总线上含有起重机相关的参数信息,以备起重机控制器使用。
与原有起重机力矩限制系统相比,智能安全控制系统采用了一些新型传感器,主要有:
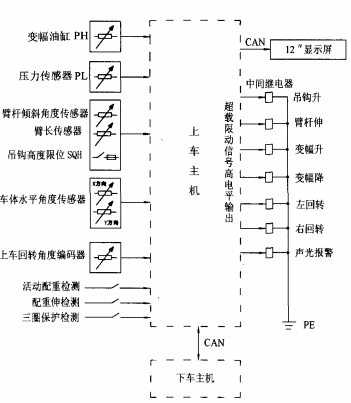
图1智能安全控制系统上车构成图
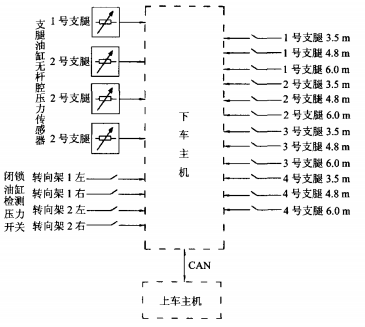
图2智能安全控制系统下车构成图
(1)回转角度传感器:该传感器安装在起重机回转中心导电环上,系统根据回转角度传感器提供的信号实时显示起重机回转的角度值(0~360°),并根据回转角度自动进行工况和性能曲线的切换;
(2)水平倾斜角度传感器:该传感器安装在上车回转中心处,给系统提供2路模拟量输入信号,系统根据输入信号可分别显示起重机顺轨方向倾斜角度、垂直方向倾斜角度;
(3)支腿跨距检测传感器与配重检测传感器均为同一型号传感器,采用了性能可靠的电感式接近开关,尾部带工作指示灯,PACK接头连接,利于现场维护。传感器在动作时,输出高电平信号至下车系统主机,系统根据其提供的信号自动进行工况和性能曲线的切换;根据提供的信号自动进行工况和性能曲线的切换。
(4)闭锁油缸压力传感器:每个转向架均装有2个压力开关,当均载油缸无杆腔达到设定压力后,压力开关动作,输出高电平信号至下车系统主机,系统下车系统采用模块化设计安装(见图3),布线简单,便于维修。
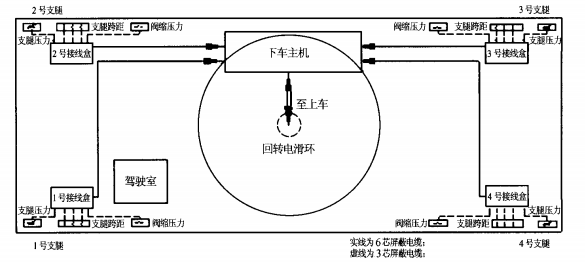
图3下车布线图
4、智能安全控制功能的实现
系统采用C语言编程,具有自诊断功能;程序采用模块化设计,易于维护,便于功能扩充。系统工作流程图如图4所示。
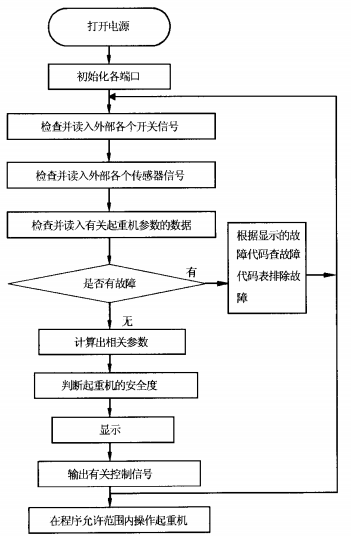
图4系统工作流程图
5、人机界面介绍
采用中文图形液晶显示屏,在同一屏内可同时显示工况、倍率、工作幅度、额定起重量、实际起重量、臂长、最大起升高度、吊臂仰角及力矩百分比(条形码)、故障代码、时间、支腿状态、均载油缸状态、回转角度、配重状态、是否使用强制开关、左/右侵限距离等,如图5所示。
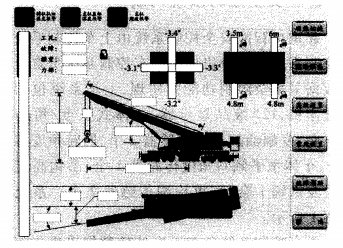
图5系统主界面
6、结束语
对上海铁路局南京东机务段NS1602型铁路起重机进行更新改造后,经过救援、施工现场实际运用,整个系统运行稳定、安全可靠,人机界面友好、直观,达到了预期的目标。该系统价格适中,功能完备,操练简单,国内既有铁路伸缩臂起重机均可安装,值得推广。


{kind=link}