

仿生学在狭窄空间组合式起重机械的研究与应用
1、概述
随着社会经济的迅速发展,电网规模和电网投资的日益增长,超高压变电站数量也不断增加。目前我国高压、超高压变电设备检修水平滞后于电网发展水平,作业机械无法相对落后,无法满足电网大检修的发展需求,为保证电力系统常态化运行,与时俱进同时引入新理念、新技术,仿生学设计具有体积小、功能强的新型组合式起重机械,即超高压变电站狭窄空间组合式起重机。能够解决满足周围环境带电要求的狭窄空间升降平台、狭窄空间起吊机械、狭窄空间运输平台这三类需求,即使紧凑狭小的空间也能够正常施工,效率大大提升,实现文明高效作业。
2、仿生学设计组合式起重机
高压、特高压变电设备之间由于空间距离狭窄,大、中型起重机械很难进去施工现场,因此,真个组合式起吊机械[2]在设计的过程中既要满足其起吊、运输功能,又要满足狭窄空间条件下的通过性能。图1为:方案路线图。
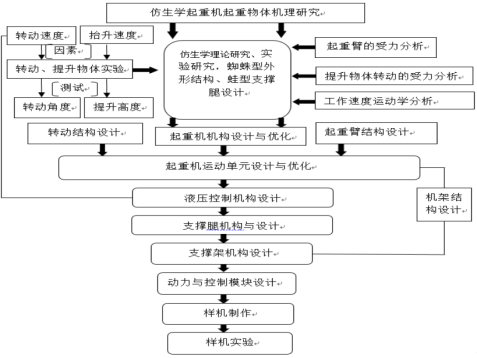

图1方案路线图
仿生学设计蛙型支腿:
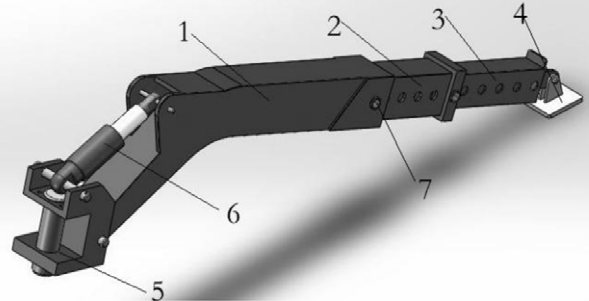
1.一级支腿,2.二级支腿,3.三级支腿,4.支撑板,5.旋转支架,6.液压系统,7.锁紧机构
图2蛙型支腿三维设计图
蛙型支腿由一级支腿、二级支腿、三级支腿、旋转支架、支撑板及液压系统、锁紧机构等组成。其中,二、三级支腿通过两侧分布的有特定配合位置的销孔,用销钉分别连接在一、二级支腿上,从而实现支腿的折叠收缩,并可以在狭窄空间灵活调整支腿的长度。一级支腿末端连接在旋转支架上,在竖直空间内,在支腿液压系统的作用下,可实现一定角度的旋转。旋转支架通过大圆锥销连接在机架上,并可以此销为轴做一定角度的旋转,实现支腿的方向调节,同时,旋转支架还为液压系统提供支撑。支撑板则销接于三级支腿末端,作为支腿最终的支撑结构。三维设计图如图2所示。
支腿分三节,第二、三节手动拉出,放到合适位置,用销子锁紧,支腿支撑地面,如果松开上下车架锁紧机构,启动动力,伸出支腿油缸,支腿将上装起重部分撑起一定高度,上装与底盘行走部分分离,可各行其是。若不松开锁紧机构,则副车架起重部分与底盘行走机构不分离,只用起吊功能,当收起支腿油缸,把第二、第三节去掉销子,收进第一节内,第一节自动回到原始位置,手动锁定旋转支架,起重机构可重新移动,到达指定位置,完成新的任务。蛙型起重机外形结构图如图3所示。
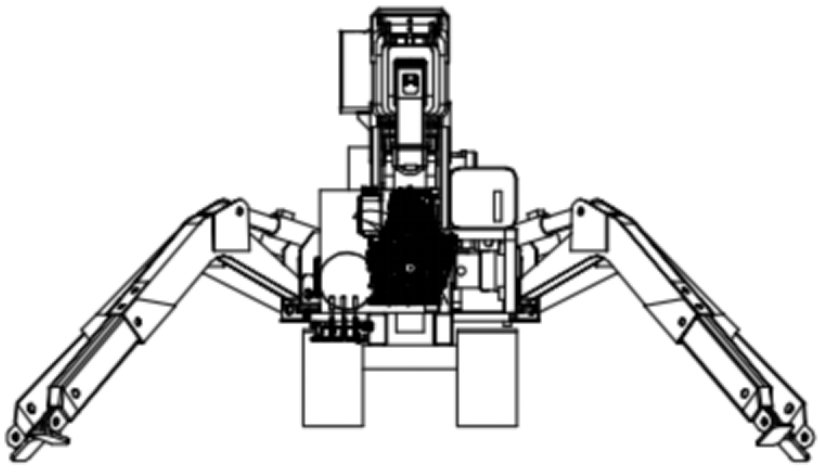
图3蛙型起重机外形图
3、主要功能
仿生学设计的超高压变电站狭窄空间组合式起重机主要由履带式运输平台和起吊平台组成。采用蜘蛛型外观设计,吊装平台采用蛙型支腿设计,不仅减小整个组合式起吊机械的外形尺寸,而且能都最大限度利用零部件的力学特性。整个设备可适用于超高压特高压变电站内狭窄空间内设备的安装调试、检修、更换等工作。
仿生学设计的超高压变电站狭窄空间组合式起重机。在进行作业时,由履带式运输平台带动上装起吊部分行走到合适位置,支起支腿,将履带式运输平台与上装起吊部分分离,形成两个独立工作单元。上装起吊部分单独工作,能将设备吊送到指定工作位置。如需要高空作业,加装上吊篮,可作为高空作业车使用,非常方便。其中履带底盘可以作为运输车,在狭小空间内外运送设备或配件,运到起吊位置,也可把拆下来的废旧物品运出到指定位置,遥控操作即可,省力减少人工搬运,速度快效率高,降低综合成本。
4、结论
仿生学设计的超高压变电站狭窄空间组合式起重机械具有结构紧凑,具有体积小、机动灵活、路面适应性广、操作性强等性能,解决大中型起吊、运载机械等常规检修车辆无法进入检修现场无法进入狭窄空间的问题。能够满足超高压、特高压变电站设备区间隔的狭小空间现的安装、调试、运维等工作,同样适用于其它电压等级主变设备区的狭小空间的作安装、调试、运维等工作,做到了所有电压等级的全覆盖。满足电网大发展、大检修的房展需求,推动电网可持续发展。


{kind=link}