

高精定位及远程自动化控制起重机研究
我国制造业还普遍存在着技术落后、设备落后、劳动生产率低下、万元产值能耗比大大高于发达国家水平的现状,而且我国现阶段以及将来会面临劳动力需求越来越紧张,劳动力成本极大增加的局面。采用物联网和自动化控制技术,实现起重机无人操作及高精定位(定位精度实现几毫米),这将是起重机械设备未来的发展趋势。
1、技术难点
要使起重机实现高精定位,主要解决以下几个问题:
吊具起吊过程中,不会产生漂移和摆动,也不会由于被吊物体重心位置随被吊物体形状不同有一定变化而产生摆动;大小车运行过程中无打滑现象;大、小车运行机构的高精度驱动。多种规划路线中自动选择最合适路线吊运物件。
2、高精定位起重机主要技术
2.1小车
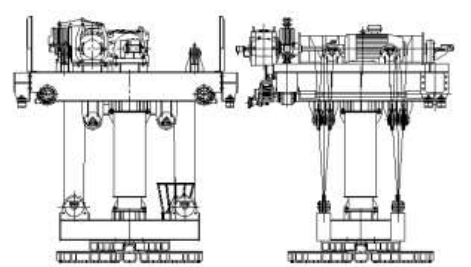

高精定位起重小车起升机构采用三绳四吊点的绕绳机构。主要由电动机、减速机、制动器、卷筒组、支撑滑轮组、导向滑轮组、钢丝绳、钢丝绳固定装置和控制系统等组成。
卷筒采用四联卷筒,两端的绳槽部分分别采用一根钢丝绳,先后通过导向滑轮1、动滑轮1、支撑滑轮1后固定在可调节的钢丝绳固定装置上;中间两端绳操采用一根钢丝绳绳,钢丝绳的一端先固定在卷筒中间槽段的一端上,另一端先后绕过导向滑轮2、动滑轮2、支撑滑轮2、支撑滑轮3、动滑轮3、导向滑轮3后固定在卷筒中间槽段的另一端上。此种结构能够很好的保证钢丝绳在升降的过程中,吊具两侧的钢丝绳受力均衡,保证吊具在水平面内不发生位移。
起升电动机采用加装编码器的变频电机,起升机构的低速轴上亦装有编码器。各组成速度闭环控制和位置闭环控制系统,可有效连续的检测吊具的起升位置和起升高度。

为保证起升装置安全、平稳的工作,起升机构设置了多种安全保护装置。
a)起升系统卷筒轴上设置有一套旋转行程限位开关和编码器,用来监察吊具行程的上、下停止位置。当吊具在上升或下降到达行程减速、停止位置和超行程时能输出信号以便控制起升电动机减速和停止,切断电动机的控制电源;
b)起升系统在吊具行程的上极限位置设有一个重锤限位开关,用于吊钩在上升到达行程极限位置时切断电动机的动力电源;
c)起升系统的电动机设有温度检测装置,避免电动机过热;
d)起升机构设有精确而可靠的超载限制器,等载荷达到额定起重量的90%时发出提示性报警信号当载荷超过额定起重量时,能切断起升机构电源停止起升运动,并发出禁止性报警信号。此时起升机构能进行下降运动。
e)采用激光防撞装置,防止在吊重过程中由于受意外冲击,吊具摆动,进入到上部的套筒时被卡死,造成设备损坏、钢丝绳断裂、吊具下落的重大安全事故。
2.2运行机构
运行机构主要有“三合一”减速电机、车轮组、齿轮齿条编码器定位系统、水平导向轮等组成。
运行机构水平导向轮安装在端梁上,沿加工过的导向轨道运行,通过导向轮的偏心调节装置,能确保小车架与轨道之间的垂直度在±1’30”以内。
在运行机构的一侧端梁外部设置有齿轮齿条编码器定位系统,齿条安装在主梁上,通过齿轮与齿条紧密啮合传动带动编码器,从而实现车轮运行过程中不空转及运行位置精准的要求。
三合一驱动电机为伺服电机,控制器亦采用伺服驱动器。电机轴上装有内环正余弦编码器,运行机构的一侧端梁外部设置有齿轮齿条的外环SSI编码器,齿条安装在主梁上,彻底解决打滑的问题。伺服驱动器同时采集两套编码器的编码值,在变频器内编程比较两套编码器值,进行运算。通过运算,实现两个功能:1、两套编码器值经过换算正常情况下必须保证一个固定比值范围,如果超出范围值,设备有故障,停车检修。2、通过换算值标定位移与编码器值的比值计算出单位位移内,伺服驱动器需要产生的IPO脉冲数,驱动伺服电机按照给定的脉冲数运行。PLC通过采集伺服驱动器收集的两套编码器值,来计算当前位置与目标位置,规划起重机运行的路径及速度曲线,使起重机既能准确定位又能平稳、安全运行到目标位置。
2.3电控部分
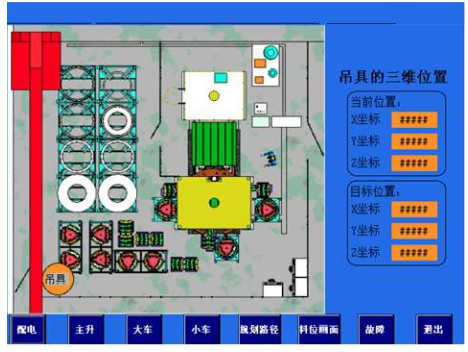
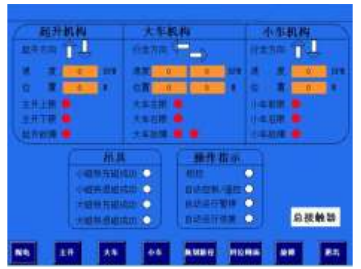
电控操作集中在操纵室内,采用“手动控制+高级自动控制+遥控”方式,电气控制采用“PLC+触摸屏+调速装置”的系统。操作操作台上按钮、操作手柄符合人体工程学原理,操作台安装在远程控制室内。电气控制柜以及电阻器均安装在起重机桥架走台上。采用彩色触摸屏可编程操作员终端作为自动方式下的操作设备。中文界面触摸屏图文显示总体画面、起重机状态画面、吊具的三维位置、运行参数、工作状态、用户管理等。
在操作台上设置选择开关,可以通过选择开关选择操作台操作、遥控器操作,在PLC出现故障不正常工作时,可以切换至控制柜控制,通过起重机上控制柜面板上的按钮进行操作。操作台上设置手动运行、自动运行选择开关,在操作台操作时,拨动开关切换到自动运行模式,通过触摸屏上设置开关操作自动运行。
1)自动运行模式:
将操作台上操作选择开关打到操作台位置,将自动/手动按钮打到自动位置,通过触摸屏上画面选择抓取或者释放位置,通过开始运行按钮开始自动运行抓取、运送、释放动作。
2)手动操作台操作
将操作台上操作选择开关打到操作台位置,将自动/手动按钮打到手动位置,通过操作台上的手柄操作各个机构,通过视频监视器监视各个机构动作位置进行定位运行。
3、结论
通过研发高精定位全自动数控起重机,使起重机逐步由人工操作转向智能化。在此过程中积累研发和制作经验,找出所使用新技术的不足和缺点,并找到改进的办法。在此基础上,我们要逐步开发,争取使起重机像工艺机器人一样,能全方位的服务人类。同时提高我国起重制造业的国际地位,使其在自动化、智能化方面处于国际领先水平。


{kind=link}