

对船用起重机的智能化波浪补偿系统的探讨分析

一、技术原理与系统架构
- 补偿机制分类
- 被动式补偿:通过蓄能器、液压阻尼等纯机械结构吸收波浪冲击,可靠性高但补偿精度有限(仅适用于低频运动)。
- 主动式补偿:基于传感器实时检测船舶运动(如升沉速度、吊钩位置),通过控制器驱动液压执行机构(比例阀、补偿油缸)动态调整吊索长度或绞车速度,实现高精度补偿。
- 智能化系统的核心组件
- 传感器层:包括激光测距仪(检测两船相对距离)、惯性测量单元(IMU,监测船舶姿态)、张力传感器(测量吊索拉力)等。
- 控制层:采用PLC或工业计算机,集成模糊PID、卡尔曼滤波、自适应控制等算法,实现运动预测与动态补偿。
- 执行层:电液比例阀调节液压马达流量,补偿油缸驱动滑轮组收放吊索,蓄能器缓冲系统压力波动。
二、智能化提升方向
- 多源传感器融合与运动预测
- 结合船舶运动模型(横摇、纵摇、升沉)与波浪谱数据,通过卡尔曼滤波或机器学习算法预测未来数秒内的运动趋势,提前调整补偿量以克服系统滞后。
- 例如,国内某型起重机通过加速度传感器与激光测距仪融合,实现吊钩升沉速度的实时估计,补偿效率达95%。
- 自适应控制算法优化
- 针对复杂海况的非线性特性,采用模糊自整定PID或滑模变结构控制,提升系统鲁棒性。
- 部分研究尝试将深度学习引入控制器设计,通过历史数据训练补偿策略,减少对精确模型的依赖。
- 故障诊断与冗余设计
- 集成液压系统压力监测与执行机构状态反馈,实现故障预警(如油温异常、液压锁卡滞)。
- 采用双冗余控制器和备用动力源,确保系统在极端条件下的可靠性。
三、技术挑战与解决方案
- 环境干扰与建模误差
- 海浪随机性强,传统数学模型难以精确描述,需结合数据驱动方法(如数字孪生)动态校准。
- 液压系统动态响应限制
- 优化液压回路设计,例如以平衡阀替代双向液压锁,减少抖动;采用高频响比例阀提升执行速度。
- 能源消耗与轻量化
- 引入变频驱动技术降低泵组功耗,或采用混合补偿系统(主动+被动)减少持续能耗。
四、应用与未来趋势
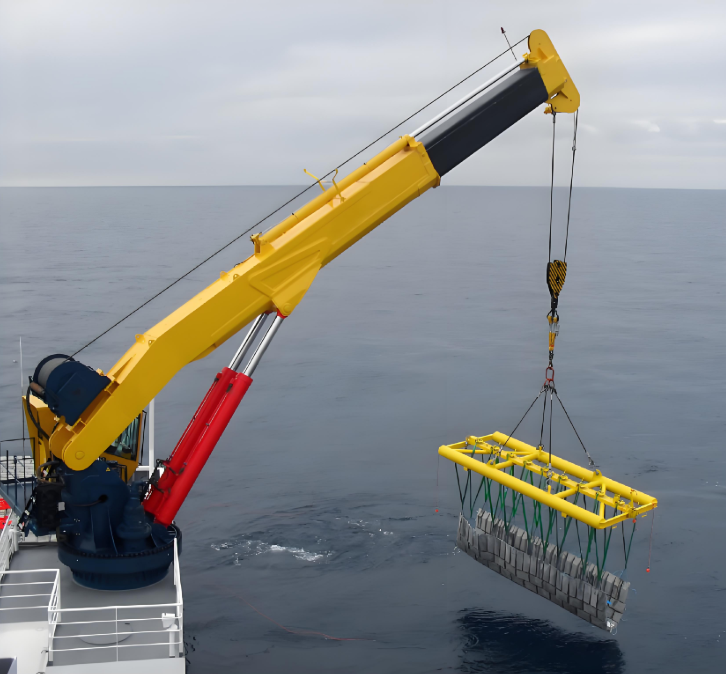
- 典型应用场景:舰船间物资补给、深海设备收放、海上风电安装等。
- 前沿发展方向:
- 数字孪生技术:构建虚拟样机模拟补偿效果,缩短调试周期。
- 人机协作:通过AR界面实时显示补偿状态,辅助操作员决策。
- 多船协同补偿:在船-船补给模式下,同步控制两船的补偿系统以扩大作业窗口。
总结
智能化波浪补偿系统通过高精度传感、先进控制算法与高效执行机构的结合,显著提升了船用起重机在复杂海况下的作业能力。未来需进一步突破多源数据融合、低延迟控制及能源效率优化等关键技术,推动该技术从实验室验证走向大规模产业化应用。国内相关研究(如武汉船机50T起重机)已实现国际先进水平,但核心元件(如高频响比例阀)的国产化仍需加强。


{kind=link}